
Анон, как мне запилить свою робовайфу?
Вот это охуенный видос, залить бы этого робота в силикон и можно будет куклоебить.
>>300764
Т.к. один ты всю работу сделать не сможешь тебе надо будет стать частью команды / основать свою.
А она должна будет изображать из себя человека и проходить тест Тьюринга или нет ?
Т.к. один ты всю работу сделать не сможешь тебе надо будет стать частью команды / основать свою.
А она должна будет изображать из себя человека и проходить тест Тьюринга или нет ?

Определенно, что вайфу не должна обладать сознанием, поскольку если встать на этот скользкий путь, есть вероятность, что она превратится в обычную тп.
>>300764
О, это хороший вопрос, я могу тебе на него детально ответить, но потом.
О, это хороший вопрос, я могу тебе на него детально ответить, но потом.
Вот публикации которые я когда-то об этом собирал http://rgho.st/7CQtrpzDx
Но они слишком узкие и в них многого не хватает, хотя описания решений применяемых в конструкции и управления некоторыми гуманоидами/андроидами там есть.
Вообще, ОП, дал бы ты почту свою.
Но они слишком узкие и в них многого не хватает, хотя описания решений применяемых в конструкции и управления некоторыми гуманоидами/андроидами там есть.
Вообще, ОП, дал бы ты почту свою.
Всегда охуевал с того насколько далеко готовы зайти некоторые личности, лишь бы не знакомиться с тянками на улице.

>>300764
Разбираться в электронике, микропроцессорах, программировании, машинном обучении, механике, электроприводах, дизайне, материаловедении.
Разбираться в электронике, микропроцессорах, программировании, машинном обучении, механике, электроприводах, дизайне, материаловедении.
>>300764
Были бы деньги и люди, всерьёз занялся бы этим. А так остаётся только мечтать и собирать картиночки.
Были бы деньги и люди, всерьёз занялся бы этим. А так остаётся только мечтать и собирать картиночки.
>>303770
Вот это верно. И я во всем этом, кроме материаловедения, стал неплохо разбираться.
Вот это верно. И я во всем этом, кроме материаловедения, стал неплохо разбираться.
>>300764
Ну что ты ОП, отписывайся.
Что ты умеешь?
Ты понимаешь что сначала хорошо бы сделать робовайфу хотя-бы в компьютерной симуляции, где у тебя руки развязаны и не надо платить тысячи долларов за детали?
Ну что ты ОП, отписывайся.
Что ты умеешь?
Ты понимаешь что сначала хорошо бы сделать робовайфу хотя-бы в компьютерной симуляции, где у тебя руки развязаны и не надо платить тысячи долларов за детали?

>>303779
Подготавливай почву, собирай единомышленников, обменивайся картиночками, обдумывайте хитрый план. А этому треду не хватает большего количества, рободевочек.
Подготавливай почву, собирай единомышленников, обменивайся картиночками, обдумывайте хитрый план. А этому треду не хватает большего количества, рободевочек.

>>304355
Я не оп, но очень хочу робовайфу, что мне надо уметь? С чего начать?
Я не оп, но очень хочу робовайфу, что мне надо уметь? С чего начать?

>>305320
https://www.ozon.ru/context/detail/id/6252317/
Вот, например, для начала
Какие языки программирования знаешь?
https://www.ozon.ru/context/detail/id/6252317/
Вот, например, для начала
Какие языки программирования знаешь?
>>305320
А вообще, надо отсортировать свой список книг, статей и т.д. на тему и уже им делиться.
А вообще, надо отсортировать свой список книг, статей и т.д. на тему и уже им делиться.
>>305116
Программировать как минимум для начала. Причём ты должен это без вопросов понимать и делать, это базовый навык.
Ну изучи там Javascript и C/C++.
Javascript для начинающих прост - learn.javascript.ru
Если ты даже программировать не сможешь то какая там робототехника.
Программировать как минимум для начала. Причём ты должен это без вопросов понимать и делать, это базовый навык.
Ну изучи там Javascript и C/C++.
Javascript для начинающих прост - learn.javascript.ru
Если ты даже программировать не сможешь то какая там робототехника.
>>305511
Это отстой рус книга какая-то, по таким нормальные люди не учатся.
Это отстой рус книга какая-то, по таким нормальные люди не учатся.

>>305658
> Программировать как минимум для начала
Вообще не обязательно. Если ты в этом шаришь, или какой-нибудь другой анон шарит, то он может же поделиться своими наработками по этому вопросу, вы же не жадные анончики?
> Программировать как минимум для начала
Вообще не обязательно. Если ты в этом шаришь, или какой-нибудь другой анон шарит, то он может же поделиться своими наработками по этому вопросу, вы же не жадные анончики?
>>305695
Ха-ха-ха! Программирование это самый простой из перечисленных навыков, помимо дизайна. Если ты и этого не можешь то что ты вообще можешь? Бесполезный.
Ха-ха-ха! Программирование это самый простой из перечисленных навыков, помимо дизайна. Если ты и этого не можешь то что ты вообще можешь? Бесполезный.
>>305116
Вот книга ftp://telezhnikov.com/other/result-A4-v0_1.pdf
Вот среда и компилятор http://www.codeblocks.org/downloads/26
Выбираешь версию codeblocks-16.01mingw-setup.exe и вперёд
Вот книга ftp://telezhnikov.com/other/result-A4-v0_1.pdf
Вот среда и компилятор http://www.codeblocks.org/downloads/26
Выбираешь версию codeblocks-16.01mingw-setup.exe и вперёд

>>305714
Не, ну я вообще охуенный и могу все что угодно, ололо, не то что ты будло. хотя на самом деле нет
Не, ну я вообще охуенный и могу все что угодно, ололо, не то что ты будло. хотя на самом деле нет
>>305823
Я-то как раз всё и могу, а ты можешь либо меня послушать либо не слушать и оставаться тем кто ты сейчас (никто который ничего не умеет).
Я-то как раз всё и могу, а ты можешь либо меня послушать либо не слушать и оставаться тем кто ты сейчас (никто который ничего не умеет).

>>305843
Ну лан, жги, интересно что-то послушать от тебя кроме пиздабольства.
Ну лан, жги, интересно что-то послушать от тебя кроме пиздабольства.

>>305929
Хм, ты совсем дурак похоже, печально :c
Хм, ты совсем дурак похоже, печально :c
>>305948
>Слышать "дурак" от куклодауна
А что ещё ожидать от борд, на бордах сидят люди в основном бестолковые.
>Слышать "дурак" от куклодауна
А что ещё ожидать от борд, на бордах сидят люди в основном бестолковые.
>>306005
Ну бывают программисты, но как максимум. А для робототехники программирование это просто один из базовых навыков.
Ну бывают программисты, но как максимум. А для робототехники программирование это просто один из базовых навыков.

>>305961
А что ты еще умеешь, кроме копипаста, гений?
А что ты еще умеешь, кроме копипаста, гений?
Блядь, им тред дали для обсуждения рободевочек, они сидят знание меряют. Долбоёбы? Долбоёбы.


Я давно пытаюсь в той или иной мере сделать такой проект, вот тред создавал и кое-какой план делали.
Ну что вы



Не тонем
>>308892
О, схожука, полистаю, а потом за scratch до этого треда, не понимал нахуй надо ваше программирование. и на один щаг буду ближе к мечте.
О, схожука, полистаю, а потом за scratch до этого треда, не понимал нахуй надо ваше программирование. и на один щаг буду ближе к мечте.

>>310332
Бамп
Бамп
>>304355
Я немного умею в электронику, паяние всякой хрени. Программировать я не умею, но хочу.
Я немного умею в электронику, паяние всякой хрени. Программировать я не умею, но хочу.
>>311128
Правда ведь, что сервоприводы нинужны и норм пацаны делают на пневматике?
Правда ведь, что сервоприводы нинужны и норм пацаны делают на пневматике?
>>>311139
Неправда, победитель Darpa Robotics Challenge - гуманойд HUBO с электросервоприводами. Также для серьёзных роботов применяется гидравлика.
Пневматика применяется не в промышленных роботах, а в производственной автоматике.
Неправда, победитель Darpa Robotics Challenge - гуманойд HUBO с электросервоприводами. Также для серьёзных роботов применяется гидравлика.
Пневматика применяется не в промышленных роботах, а в производственной автоматике.
>>311096
Да, сойдёт, но микроконтроллеры типа ардуино программируют на Си.
Иди и учи! https://repl.it/languages/python
Да, сойдёт, но микроконтроллеры типа ардуино программируют на Си.
Иди и учи! https://repl.it/languages/python
>>311165
Дарповские гуманоиды это же та еще срань. С помощью сервоприводов можно сделать робота из фантастики середины прошлого века, но чтобы сделать робота, реально похожего на человека нужен принципиально другой подход. Нужны актуаторы, хотя бы отдаленно похожие на человеческие мышцы, то есть способные сжиматься и разжиматься. Пока больше всего подходит пневматика, потому что подходящие электроактивные полимеры еще не изобрели.
Дарповские гуманоиды это же та еще срань. С помощью сервоприводов можно сделать робота из фантастики середины прошлого века, но чтобы сделать робота, реально похожего на человека нужен принципиально другой подход. Нужны актуаторы, хотя бы отдаленно похожие на человеческие мышцы, то есть способные сжиматься и разжиматься. Пока больше всего подходит пневматика, потому что подходящие электроактивные полимеры еще не изобрели.
>>311193
>сделать робота, реально похожего на человека нужен принципиально другой подход. Нужны актуаторы,
Если актуаторы хорошие и жёсткие то мягкость можно имитировать динамикой системы управления.
Есть и механический подход https://www.google.ru/search?q=series+elastic+actuators позволяющий получить эластичные актуаторы.
>пневматика
Пневматика нелинейная, трудноуправляемая, слабая, поэтому её не применяют в гуманоидных роботах, разве что в верхней части тела актроида её применяли (из-за бесшумности).
>Дарповские гуманоиды это же та еще срань.
Они впечатляющие, лучшие в мире. Особенно самый последний ATLAS next generation (более ранний ATLAS был неуклюжим).
Надо различать гуманоидов и андроидов, с т.з.гуманоидов ATLAS - О.К.
Для андроидов такой подход не подойдёт потому что гидравлика дорогая и опасная, а вот электрические сервоприводы с гармоническими приводами подходят (см. видеоелейтед).
Мне кажется что заявлять что нормальных роботов не будет пока не появится технология Х (в твоём случае - EAP, artificial muscles) это просто отговорка.
Я думаю и на современных технологиях можно сделать впечатляющие вещи, например улучшив ту же HRP-4(C).
>сделать робота, реально похожего на человека нужен принципиально другой подход. Нужны актуаторы,
Если актуаторы хорошие и жёсткие то мягкость можно имитировать динамикой системы управления.
Есть и механический подход https://www.google.ru/search?q=series+elastic+actuators позволяющий получить эластичные актуаторы.
>пневматика
Пневматика нелинейная, трудноуправляемая, слабая, поэтому её не применяют в гуманоидных роботах, разве что в верхней части тела актроида её применяли (из-за бесшумности).
>Дарповские гуманоиды это же та еще срань.
Они впечатляющие, лучшие в мире. Особенно самый последний ATLAS next generation (более ранний ATLAS был неуклюжим).
Надо различать гуманоидов и андроидов, с т.з.гуманоидов ATLAS - О.К.
Для андроидов такой подход не подойдёт потому что гидравлика дорогая и опасная, а вот электрические сервоприводы с гармоническими приводами подходят (см. видеоелейтед).
Мне кажется что заявлять что нормальных роботов не будет пока не появится технология Х (в твоём случае - EAP, artificial muscles) это просто отговорка.
Я думаю и на современных технологиях можно сделать впечатляющие вещи, например улучшив ту же HRP-4(C).

>>311234
Да ну, пневматика, норм, че ты.
Да ну, пневматика, норм, че ты.
>>311274
Никто её не использует ни в точных промышленных роботах (только в слабых сборных штуках и автоматике), ни в ходячих роботах. Есть этому причины. Поспоришь с ними?
Никто её не использует ни в точных промышленных роботах (только в слабых сборных штуках и автоматике), ни в ходячих роботах. Есть этому причины. Поспоришь с ними?
>>311333
Ну в точных промышленных роботах она не нужна, это правда, а почему ее не используют в гуманоидных роботах я хз, наверное просто слишком сложно это.
Ну в точных промышленных роботах она не нужна, это правда, а почему ее не используют в гуманоидных роботах я хз, наверное просто слишком сложно это.
>>311353
Потому что нелинейная управляемость, и недостаточная удельная мощность. Задача управления походкой гуманоидного робота итак сложная, нелинейная, если к этому ещё нелинейные актуаторы добавлять то это вообще, можно и не начинать.
Хотя сейчас пытаются контролируемые нелинейности в некоторые степени свободы добавлять, после тщательного моделирования и мат. анализа динамики, но выглядит что этого не нужно.
Чем вот тебя не устраивает HRP4-C из видео?
Потому что нелинейная управляемость, и недостаточная удельная мощность. Задача управления походкой гуманоидного робота итак сложная, нелинейная, если к этому ещё нелинейные актуаторы добавлять то это вообще, можно и не начинать.
Хотя сейчас пытаются контролируемые нелинейности в некоторые степени свободы добавлять, после тщательного моделирования и мат. анализа динамики, но выглядит что этого не нужно.
Чем вот тебя не устраивает HRP4-C из видео?
>>311431
Ну хорошо, ты мне объяснил че почем, но мне все равно кажется, что моторы в местах, где должны располагаться суставы это не очень. ХРП неплохая, да, еще бы увидеть ее голенькую, без кожухов.
Ну хорошо, ты мне объяснил че почем, но мне все равно кажется, что моторы в местах, где должны располагаться суставы это не очень. ХРП неплохая, да, еще бы увидеть ее голенькую, без кожухов.
>>311431
Хотя если к цилиндру приделать обратную связь то должно быть похуй на нелинейность, нет?
Хотя если к цилиндру приделать обратную связь то должно быть похуй на нелинейность, нет?


>>311623
Голенькая она выглядит так, скриншот из статьи и фото робота-основы.
>что моторы в местах, где должны располагаться суставы это не очень
Это не очень, но такая технология сейчас отработана. Если появятся новые актуаторы, новые технологии производства (вдруг материаловеды придумают какой-то электроактивный материал с хорошим КПД и свойствами, а другие материаловеды придумают как его 3д-печатать) то подход может поменяться.
>>311647
Без обратной связи в любом сервоприводе (ну кроме шаговых моторов) делать нечего. Проблема с пневматикой в том что газ сжимаемый и для достижения хорошей скорости реакции надо быстро повысить давление, а чтобы после этого не было перехлёста надо его понизить.
Т.е. уравнения управления неприятные.
Вот в гидравлике такой проблемы нет, потому что жидкость несжимаема (и то, люди писали о проблемах с резонансами в клапанах). Но у гидравлики проблемы стоимости, надёжности и опасности (течь из гидрошланга стреляет струйкой масла которая режет кожу при контакте).
Лично я думал/думаю для первых прототипов робогорничной вообще делать колёсную базу (под юбкой), и зато более развитые руки и голову для манипуляции объектами.
Голенькая она выглядит так, скриншот из статьи и фото робота-основы.
>что моторы в местах, где должны располагаться суставы это не очень
Это не очень, но такая технология сейчас отработана. Если появятся новые актуаторы, новые технологии производства (вдруг материаловеды придумают какой-то электроактивный материал с хорошим КПД и свойствами, а другие материаловеды придумают как его 3д-печатать) то подход может поменяться.
>>311647
Без обратной связи в любом сервоприводе (ну кроме шаговых моторов) делать нечего. Проблема с пневматикой в том что газ сжимаемый и для достижения хорошей скорости реакции надо быстро повысить давление, а чтобы после этого не было перехлёста надо его понизить.
Т.е. уравнения управления неприятные.
Вот в гидравлике такой проблемы нет, потому что жидкость несжимаема (и то, люди писали о проблемах с резонансами в клапанах). Но у гидравлики проблемы стоимости, надёжности и опасности (течь из гидрошланга стреляет струйкой масла которая режет кожу при контакте).
Лично я думал/думаю для первых прототипов робогорничной вообще делать колёсную базу (под юбкой), и зато более развитые руки и голову для манипуляции объектами.
>>311734
Кмк, травмы может нанести только йоба гидравлика, которая тоннами металла ворочает, а в масштабах робота там все не так страшно
Кмк, травмы может нанести только йоба гидравлика, которая тоннами металла ворочает, а в масштабах робота там все не так страшно
>>311823
Неа, в ATLAS гидравлика высокого давления, от такой струйка тебе кожу и порежет.
Неа, в ATLAS гидравлика высокого давления, от такой струйка тебе кожу и порежет.
Кто там программированию учился, вот неплохая книга по программированию на JS
https://vk.com/doc10903696_272054170
https://vk.com/doc10903696_272054170
бамп

Не дадим угаснуть мечте.
Бамп!
Бамп!
>>313094
Ну расскажи чему ты сегодня научился или учишься, анон. Это ты мне на почту писал, кстати?
Ну расскажи чему ты сегодня научился или учишься, анон. Это ты мне на почту писал, кстати?


>>313184
Нет, бананас, это был не я. Я только рободевочек доставляю, но спасибо что спросил
**скачал скратч, сделал десяток заданий по сишке, типа
#include <stdio.h>
int main (void)
{
int minuend, subtrahend, difference;
minuend = 87;
subtrahend = 15;
difference = minuend - subtrahend;
printf("Dev %i in %i hin %i\n", minuend, subtrahend, difference);
return 0;
}
И сейчас, пилю пиксель арт(учусь чтобы доставлять, лол.**
Вот, всего понемногу, сейчас сготовлю ужин и постараюсь одалять как можно больше из скратча.Алсо, сишка кажется очень приятной, но чувствую,ч то дьявол кроется в деталях и скоро я пойму, что это ад, а моежт и нет. Не берусь судить. Реальнай проблема - распределение времени, надо придумать способ, не сбиваться с ритма и поддерживать запал.
Нет, бананас, это был не я. Я только рободевочек доставляю, но спасибо что спросил
**скачал скратч, сделал десяток заданий по сишке, типа
#include <stdio.h>
int main (void)
{
int minuend, subtrahend, difference;
minuend = 87;
subtrahend = 15;
difference = minuend - subtrahend;
printf("Dev %i in %i hin %i\n", minuend, subtrahend, difference);
return 0;
}
И сейчас, пилю пиксель арт(учусь чтобы доставлять, лол.**
Вот, всего понемногу, сейчас сготовлю ужин и постараюсь одалять как можно больше из скратча.Алсо, сишка кажется очень приятной, но чувствую,ч то дьявол кроется в деталях и скоро я пойму, что это ад, а моежт и нет. Не берусь судить. Реальнай проблема - распределение времени, надо придумать способ, не сбиваться с ритма и поддерживать запал.
>>313284
>**скачал скратч, сделал десяток заданий по сишке, типа
Так что такое скратч? MIT scratch? А как ты компилируешь и выполняешь сишку?
>И сейчас, пилю пиксель арт(учусь чтобы доставлять, лол.**
Неплохо, а почему бы тебе не попробовать пилить воксель-арт, берёшь там программу goxel или Magical Voxel и пилишь.
>Алсо, сишка кажется очень приятной, но чувствую,ч то дьявол кроется в деталях и скоро я пойму, что это ад, а моежт и нет. Не берусь судить.
Ну в Си бывают сложности с размерами типов данных (32-64 бита), с знаковыми и беззнаковыми числами, и ещё часто с указателями - ошибки памяти всякие, segmentation fault, утечки памяти. Вроде все основные перечислил.
Большая часть из этих проблем уходит в языках типа javascript, за что приходится платить производительностью (но JS быстрый и позволяет подключать модули на Си, так что в конце все выигрывают).
>**скачал скратч, сделал десяток заданий по сишке, типа
Так что такое скратч? MIT scratch? А как ты компилируешь и выполняешь сишку?
>И сейчас, пилю пиксель арт(учусь чтобы доставлять, лол.**
Неплохо, а почему бы тебе не попробовать пилить воксель-арт, берёшь там программу goxel или Magical Voxel и пилишь.
>Алсо, сишка кажется очень приятной, но чувствую,ч то дьявол кроется в деталях и скоро я пойму, что это ад, а моежт и нет. Не берусь судить.
Ну в Си бывают сложности с размерами типов данных (32-64 бита), с знаковыми и беззнаковыми числами, и ещё часто с указателями - ошибки памяти всякие, segmentation fault, утечки памяти. Вроде все основные перечислил.
Большая часть из этих проблем уходит в языках типа javascript, за что приходится платить производительностью (но JS быстрый и позволяет подключать модули на Си, так что в конце все выигрывают).
>>304405
Трать по шесть-восемь часов в день на разработки. Покупать детали. Ковыряться одновременно со всеми направлениями из >>303770
Скажем, я бы занялся базовым ПО, ещё кто-то - вычислительным железом, другой анон - механикой, третий - моторами всякими, другие - высокоуровневым программированием (речь, распознавание образов, ИИ). Внешность можно содрать с силиконовой куклы.
Трать по шесть-восемь часов в день на разработки. Покупать детали. Ковыряться одновременно со всеми направлениями из >>303770
Скажем, я бы занялся базовым ПО, ещё кто-то - вычислительным железом, другой анон - механикой, третий - моторами всякими, другие - высокоуровневым программированием (речь, распознавание образов, ИИ). Внешность можно содрать с силиконовой куклы.
>>313582
>сложности с размерами типов данных
Просто используй типы с точным размером. Как правило, они определены на большинстве платформ.
>сложности с размерами типов данных
Просто используй типы с точным размером. Как правило, они определены на большинстве платформ.
>>300764
так как ты инфантальный и самое главное тупой аутист без денег то думаю никак, от слова совсем.
так как ты инфантальный и самое главное тупой аутист без денег то думаю никак, от слова совсем.
>>313787
У нас тут уже коллаборация ебать вон какая. так что я не один.
У нас тут уже коллаборация ебать вон какая. так что я не один.
>>300764
Анончики, как старый дядька скажу. Легче вам тянку нормальную на время цепануть, чем в этой хуйне победить. Ну а если стараетесь, делайте на продажу, потом опять мало-мальски годную девку цепануть сможете, если хотя бы из дома на заработанные деньхи выезжать станете.
Ну а вот какая робовайфа будет покупаема:
смотрите "робот КУКА сварка". Если сделаете что помельче, но движения будут точными, оно станет покупным. Пока КУКА бу стоит 10 кусков еврозелени.
Анончики, как старый дядька скажу. Легче вам тянку нормальную на время цепануть, чем в этой хуйне победить. Ну а если стараетесь, делайте на продажу, потом опять мало-мальски годную девку цепануть сможете, если хотя бы из дома на заработанные деньхи выезжать станете.
Ну а вот какая робовайфа будет покупаема:
смотрите "робот КУКА сварка". Если сделаете что помельче, но движения будут точными, оно станет покупным. Пока КУКА бу стоит 10 кусков еврозелени.
>>313923
Также робовайфа для стариков. Стакан воды, привезти увезти утку/горшок, вызвать скорую, все такое.
Также робовайфа для стариков. Стакан воды, привезти увезти утку/горшок, вызвать скорую, все такое.
>>313923
Девка это не самоцель, ТНН. Короче гуляй, дядя, тебе не понять.
Девка это не самоцель, ТНН. Короче гуляй, дядя, тебе не понять.
Еще РОБОТ КИСЕЛЕВ. Сам собирает новости в инете и читает, показывает. Вот блять можно убить зомбоящик.
>>313582
>>313582
> Так что такое скратч? MIT scratch?
Да, он самый, я тут посты рыл и увидел, что анону советовали. Взял себе.
> А как ты компилируешь и выполняешь сишку?
GNU компилятор, notepad, консоль.
> Ну в Си бывают сложности с размерами типов данных (32-64 бита), с знаковыми и беззнаковыми числами, и ещё часто с указателями - ошибки памяти всякие, segmentation fault, утечки памяти. Вроде все основные перечислил.
Большая часть из этих проблем уходит в языках типа javascript, за что приходится платить производительностью (но JS быстрый и позволяет подключать модули на Си, так что в конце все выигрывают).
Буду иметь в виду. Благодарю.
>>313582
> Так что такое скратч? MIT scratch?
Да, он самый, я тут посты рыл и увидел, что анону советовали. Взял себе.
> А как ты компилируешь и выполняешь сишку?
GNU компилятор, notepad, консоль.
> Ну в Си бывают сложности с размерами типов данных (32-64 бита), с знаковыми и беззнаковыми числами, и ещё часто с указателями - ошибки памяти всякие, segmentation fault, утечки памяти. Вроде все основные перечислил.
Большая часть из этих проблем уходит в языках типа javascript, за что приходится платить производительностью (но JS быстрый и позволяет подключать модули на Си, так что в конце все выигрывают).
Буду иметь в виду. Благодарю.


>>313945
> ТНН. Короче гуляй, дядя, тебе не понять.
Поясни, пожалуйста. У тебя ритм речи как у самовнушенца. Бабы вправду нинужны, но до этого надо дойти. Это как со страхом перед дракой. Бояться не нужно, но лишь опытный боец сделает все, как надо.
> ТНН. Короче гуляй, дядя, тебе не понять.
Поясни, пожалуйста. У тебя ритм речи как у самовнушенца. Бабы вправду нинужны, но до этого надо дойти. Это как со страхом перед дракой. Бояться не нужно, но лишь опытный боец сделает все, как надо.

>>313923
Не знаю, в силу ли возраста, или ещё чего, но ты совсем неверно истолковал суть треда.
И да, я общался с живой тян, был в отношениях.
Я не хочу повторения подобного и не пожелаю никому.
Не знаю, в силу ли возраста, или ещё чего, но ты совсем неверно истолковал суть треда.
И да, я общался с живой тян, был в отношениях.
Я не хочу повторения подобного и не пожелаю никому.
>>313959
Зачем мне сейчас напрягаться ради каких-то тянок, если я могу сидеть тут и мокнуть от влажных фантазий?
Зачем мне сейчас напрягаться ради каких-то тянок, если я могу сидеть тут и мокнуть от влажных фантазий?
>>313923
Представь, что ты можешь создать что - то действительно великое, не на продажу, а для себя. Не говно сайт на коленке, не просиживать жопу в офисе, а реальное стоящее дело, для которого хочется жить и не страшно умереть. Чувствуешь? Робовайфу может быть таким делом, а живые тян…
https://brchan.org/rus/res/309787.html#312401
Вот там посмотри и подумай ещё раз, прежде, чем тащить их сюда.
Представь, что ты можешь создать что - то действительно великое, не на продажу, а для себя. Не говно сайт на коленке, не просиживать жопу в офисе, а реальное стоящее дело, для которого хочется жить и не страшно умереть. Чувствуешь? Робовайфу может быть таким делом, а живые тян…
https://brchan.org/rus/res/309787.html#312401
Вот там посмотри и подумай ещё раз, прежде, чем тащить их сюда.
>>313967
Разочарования омежки. Я немного другое имел в виду. Легче достичь счастья с бабой, чем возясь с железом. Я не писал, что с бабой счастья достичь легко и надолго. Хуй-то там.
>>313970
Я не советовал напрягаться. Во-первых, шансы понижаются. Можешь поправить свой стиль и хватит. Во-вторых, я просто написал, легче закадрить живую девицу, чем достичь успеха в эмоциональном плане.
>>313986
Зачем ты мне притащил ноулайферский бугурт-тред? Я понимаю, уродам или калекам бабы в рашке не светят. Но в принципе, схуя ты тащишь говно, которым либо неудачники тешат друг друга, либо хитрые неудачники начинают троллить внушаемых слабачков, отбирая надежду у них на свершение эротических грез наяву.
Разочарования омежки. Я немного другое имел в виду. Легче достичь счастья с бабой, чем возясь с железом. Я не писал, что с бабой счастья достичь легко и надолго. Хуй-то там.
>>313970
Я не советовал напрягаться. Во-первых, шансы понижаются. Можешь поправить свой стиль и хватит. Во-вторых, я просто написал, легче закадрить живую девицу, чем достичь успеха в эмоциональном плане.
>>313986
Зачем ты мне притащил ноулайферский бугурт-тред? Я понимаю, уродам или калекам бабы в рашке не светят. Но в принципе, схуя ты тащишь говно, которым либо неудачники тешат друг друга, либо хитрые неудачники начинают троллить внушаемых слабачков, отбирая надежду у них на свершение эротических грез наяву.
>>314003
> чем достичь успеха в эмоциональном плане.
чем достичь успеха в эмоциональном плане занимаясь такой мертвой вещью, как роботы.
> чем достичь успеха в эмоциональном плане.
чем достичь успеха в эмоциональном плане занимаясь такой мертвой вещью, как роботы.
>>314026
Лол, у вас тут всех батруха. Спорю, вы не повторите одноприводный маятник из туториала МИТ, чтобы он держал конечность наверху за счет раскачиваний.
Лол, у вас тут всех батруха. Спорю, вы не повторите одноприводный маятник из туториала МИТ, чтобы он держал конечность наверху за счет раскачиваний.
А самая ценность общения с женщиной для вас - наличие внешнего субъекта, который вас оценит и вы с ним чему-либо научитесь. Это как дружба. Увы, они непостоянны. Но заменять это программируемым роботом - отчаяние.
Впрочем, удачи. Ну и какое-то время посидите без стерв, это помогает.
Впрочем, удачи. Ну и какое-то время посидите без стерв, это помогает.
Да, великие люди на бордах не рождаются. Пытайтесь искать себе настоящих учителей извне. И для разработки роботов потребуется дохуя матана и коллег и средств. У вас нет нихуя. Потому-то я и съязвил, что с бабами договориться проще. Не потому, что надо это делать, а не то, что задумали вы.
Просто хотел сказать: не удивляйтесь, когда не достигнете такой ебанутой цели, как цель в ОП-посте. Но нередко сам процесс доставляет.



>>313923
Да никто не спорит что женщина это проще, но понимаешь, нам тут интересно как создать компаньона который будет всегда верен тебе, будет тебе помогать по дому и по жизни.
Глупо думать что всем хватит женщин, реальность такова что одиноких людей очень много, особенно в старости.
Так что для меня вопрос того что "может андроидные роботы не нужны?" вообще не стоит, мне очевидно что люди друг о друге позаботиться не могут, значит нужно как-то механически это делать. Вопрос только как.
Да никто не спорит что женщина это проще, но понимаешь, нам тут интересно как создать компаньона который будет всегда верен тебе, будет тебе помогать по дому и по жизни.
Глупо думать что всем хватит женщин, реальность такова что одиноких людей очень много, особенно в старости.
Так что для меня вопрос того что "может андроидные роботы не нужны?" вообще не стоит, мне очевидно что люди друг о друге позаботиться не могут, значит нужно как-то механически это делать. Вопрос только как.
>>302046
>А она должна будет изображать из себя человека и проходить тест Тьюринга или нет ?
Думаю не стоит этим задаваться, она должна быть полезна в быту и заботиться, а тест тьюринга программы успешно проходят если прикидываются неадекватными или детьми.
>А она должна будет изображать из себя человека и проходить тест Тьюринга или нет ?
Думаю не стоит этим задаваться, она должна быть полезна в быту и заботиться, а тест тьюринга программы успешно проходят если прикидываются неадекватными или детьми.
>>314042
Я тут самый умненький наверное, я уже не только маятник стабилизировал, я уже и многоногих роботов со зрением собирал (фото не будет, влом). Но до полезных домашних роботов лежит длинный путь, конечно.
Я тут самый умненький наверное, я уже не только маятник стабилизировал, я уже и многоногих роботов со зрением собирал (фото не будет, влом). Но до полезных домашних роботов лежит длинный путь, конечно.
>>314146
Мои идеи остановились на прототипах. Не хватало средств, а там были детальки дешевле, чем сервопривода и сенсоры, и матана надо было меньше.
Ну что ж, развивайте головы, господа. Только не подменяйте роботами баб. Эмоции сиречь общение.
И еще. Скорее всего, тебе стоит не откладывать попытку найти необычную девочку и задружиться с ней. У меня была подруга модель не ради ебли, и спустя 10 лет все ко мне тянется, весьма душевно. Второй ламповый вариант - поебушка с милфой, если попадется развитая. Что случается нечасто. Мне повезло. Морщился от признаков ее возраста, но потом понял, что был не в пролете. А в целом разочарования есть у большинства мужчин. А жизнь с женщинами не тема этого треда.
Мои идеи остановились на прототипах. Не хватало средств, а там были детальки дешевле, чем сервопривода и сенсоры, и матана надо было меньше.
Ну что ж, развивайте головы, господа. Только не подменяйте роботами баб. Эмоции сиречь общение.
И еще. Скорее всего, тебе стоит не откладывать попытку найти необычную девочку и задружиться с ней. У меня была подруга модель не ради ебли, и спустя 10 лет все ко мне тянется, весьма душевно. Второй ламповый вариант - поебушка с милфой, если попадется развитая. Что случается нечасто. Мне повезло. Морщился от признаков ее возраста, но потом понял, что был не в пролете. А в целом разочарования есть у большинства мужчин. А жизнь с женщинами не тема этого треда.
>>314003
>Легче достичь счастья с бабой, чем возясь с железом.
Ну знаешь, это как разница между сторить себе дачку с кафелем и коммунизм. Коммунизм это круче, он после тебя останется, и ещё он будет для всех а не только для тебя.
Можно просто массовое производство запустить и будут у анонов рободевочки, разве не круто?
>Легче достичь счастья с бабой, чем возясь с железом.
Ну знаешь, это как разница между сторить себе дачку с кафелем и коммунизм. Коммунизм это круче, он после тебя останется, и ещё он будет для всех а не только для тебя.
Можно просто массовое производство запустить и будут у анонов рободевочки, разве не круто?
>>314224
А ты понимаешь что даже если у тебя есть жена, то горничная которая стирает-готовит-убирает не помешает ?
А ты понимаешь что даже если у тебя есть жена, то горничная которая стирает-готовит-убирает не помешает ?
>>314234
А что? Хуй даже знает, с учетом состояния умов современной молодежи (слишком короткое расстояние между "хочу" и "дайте мне").
А что? Хуй даже знает, с учетом состояния умов современной молодежи (слишком короткое расстояние между "хочу" и "дайте мне").
А по факту в треде:
- 2,3 готовых анона, ищущих компаньонов
- Один развиванец
- и оп
Не густо, но могло быть хуже
- 2,3 готовых анона, ищущих компаньонов
- Один развиванец
- и оп
Не густо, но могло быть хуже
>>314253
ОК.
Это моя перефразировка теории йогов, аналог ее есть в классической психологии.
Интеллект как разум вы себе представляете. Поехали дальше. "Сердце", эмоции. Убираем оттуда интуицию, это продукт тонкого взаимодействия ума и "сердца". Оставляем эмоции как реакции на мир. К этой же сфере относим желания. В том числе желания удовлетворения потребностей. Амбиции. Нижний уровень - управление телом, ощущения подобно животным с малоразвитой высшей нервной деятельностью. Туда же сходятся данные от сенсоров.
Я не до конца понимаю смысл эмоций. По-видимому, это способ познавать неанализируемые вещи. И способ взаимодействия. И способ выбора, чему обучаться. Роботу же нисхуя энергию не потратить просто из радости? В-общем, эмоции для роботов будут социальными функциями. Также цели действий у человекоподобных роботов должны основываться на эмоциях в том числе. Не как импульсах, сбивающих с толку. А как на притяжении к некоторым объектам/классам объектов.
Взаимодействие между уровнями по типу прерываний. На каждом уровне, помимо собственно разума, свой интеллектик, или разделение части ресурсов с уровнем разума. Эмоциональный ум позволит "не реагировать на мелочи", хотя опознавать мелочи придется умом, но магнетическое стремление к главной цели свойственно скорее эмоции.
Также нужен будет транслятор между уровнями. Нижний уровень может останавливать верхний, но когда он может им командовать? Большой вопрос. В рамках динамически реорганизующейся системы возможно было бы обучение. Ну а так придется примитивненько, с помощью морали.
Простите, сегодня не в ударе.
ОК.
Это моя перефразировка теории йогов, аналог ее есть в классической психологии.
Интеллект как разум вы себе представляете. Поехали дальше. "Сердце", эмоции. Убираем оттуда интуицию, это продукт тонкого взаимодействия ума и "сердца". Оставляем эмоции как реакции на мир. К этой же сфере относим желания. В том числе желания удовлетворения потребностей. Амбиции. Нижний уровень - управление телом, ощущения подобно животным с малоразвитой высшей нервной деятельностью. Туда же сходятся данные от сенсоров.
Я не до конца понимаю смысл эмоций. По-видимому, это способ познавать неанализируемые вещи. И способ взаимодействия. И способ выбора, чему обучаться. Роботу же нисхуя энергию не потратить просто из радости? В-общем, эмоции для роботов будут социальными функциями. Также цели действий у человекоподобных роботов должны основываться на эмоциях в том числе. Не как импульсах, сбивающих с толку. А как на притяжении к некоторым объектам/классам объектов.
Взаимодействие между уровнями по типу прерываний. На каждом уровне, помимо собственно разума, свой интеллектик, или разделение части ресурсов с уровнем разума. Эмоциональный ум позволит "не реагировать на мелочи", хотя опознавать мелочи придется умом, но магнетическое стремление к главной цели свойственно скорее эмоции.
Также нужен будет транслятор между уровнями. Нижний уровень может останавливать верхний, но когда он может им командовать? Большой вопрос. В рамках динамически реорганизующейся системы возможно было бы обучение. Ну а так придется примитивненько, с помощью морали.
Простите, сегодня не в ударе.
>>314292
Я не развиванец, а тралл-старпер, положивший зубы на полку временно.
Я не развиванец, а тралл-старпер, положивший зубы на полку временно.
>>314358
Интеллект, связанный с низшим центром, уже хорошо развит у врагов. Это двигательные функции, самодиагностика и аналог вестибулярки.
Интеллект, связанный с низшим центром, уже хорошо развит у врагов. Это двигательные функции, самодиагностика и аналог вестибулярки.
>>314376
Развиванец выше, он сишкой обмазывается.
Итого:
- 2,3 готовых анона, ищущих компаньонов
- Один развиванец
- Один тралл -старпёр
- и оп - хуй, сдаётся уже свалил.
Ну что же, целая банда.
Развиванец выше, он сишкой обмазывается.
Итого:
- 2,3 готовых анона, ищущих компаньонов
- Один развиванец
- Один тралл -старпёр
- и оп - хуй, сдаётся уже свалил.
Ну что же, целая банда.
Я пока съебу, весь тред обсемёнил, ну и тут не совсем безнадежная публика. Может буду вас беспокоить еще. Пока.



>>314419
Ок, а я сваливаю, трахать сишку и сратч.
Не проеби тред. Буду реже заходить, а то броч отвлекает от саморазвиванства.
Ок, а я сваливаю, трахать сишку и сратч.
Не проеби тред. Буду реже заходить, а то броч отвлекает от саморазвиванства.
>>314461
Okey. ya togda shas solidworks nakachu i budu uchit. Tolko snachala shindows pereustanovlu.
Okey. ya togda shas solidworks nakachu i budu uchit. Tolko snachala shindows pereustanovlu.

>>314476
Vot eto ty molodec
Vot eto ty molodec
>>314509
U menya kstate 3d printer est', pechatal podobnuyu huitku.
U menya kstate 3d printer est', pechatal podobnuyu huitku.
Зделал русскую раскладку, а то как долбоеб.
Аноны зайдя в этот тред я тоже загорелся ,из какого материала будет скелет?
>>314763
Если в натуральную величину, то карбон, дюраль, титан. Вряд ли пластик выдержит вес конструкции.
Если в натуральную величину, то карбон, дюраль, титан. Вряд ли пластик выдержит вес конструкции.
>>314358
>Взаимодействие между уровнями по типу прерываний.
Вот этого не стал бы городить. Лучше использовать более абстрактные примитивы взаимодействия типа сообщений.
>Взаимодействие между уровнями по типу прерываний.
Вот этого не стал бы городить. Лучше использовать более абстрактные примитивы взаимодействия типа сообщений.
>>315402
Просто имею маленький опыт работы с композитами, правда работал только со стеклотканью и стекломатом
Просто имею маленький опыт работы с композитами, правда работал только со стеклотканью и стекломатом
>>315575
Кевлар как и карбон ткани они просто пропитываются грубо говоря смолой, и получаешь изделие лол .А так самый распространенный процесс производства вакуумная инфузия
Кевлар как и карбон ткани они просто пропитываются грубо говоря смолой, и получаешь изделие лол .А так самый распространенный процесс производства вакуумная инфузия
>>315703
А если к смоле добавить пластификатор то изделие может быть пластичным по крайней мере стекломат ,насчет карбона с кевларом не знаю врать не буду
А если к смоле добавить пластификатор то изделие может быть пластичным по крайней мере стекломат ,насчет карбона с кевларом не знаю врать не буду
>>314522
Да ты двойной молодец! А какая именно модель? А может сдизайним и напечатаем руку?
Да ты двойной молодец! А какая именно модель? А может сдизайним и напечатаем руку?

Да, мне не лень рисовать это в четыре утра.**

>>315927
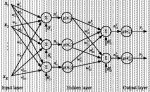
Хорошая схема!
Видно что ты понимаешь что почти все роботы так устроены - есть микроконтроллер или просто отдельный процессор под управлением RTOS или голой прошивки, он подключён к сенсорами и актуаторам напрямую и выполняет критические задачи реального времени - вычисление контроллеров приводов, балансирование робота, опрос сенсорос - в цикле с частотой где-то 1000 герц.
А рядом стоит обычный компьютер под управлением обычной ОС, и он по последовательному интерфейсу типа Ethernet отправляет команды и получает данные из системы реального времени.
На этом компьютере уже крутятся прикладные программы - Speech To Text, Text To Speech, Распознавание образов, биометрический замок на хозяина, модель поведения.
Хммм, я сам в одном неоконченном документе похожую схему рисовал - пикрелейтейд. Но там аппаратная часть не показана. Кстати документ можешь почитать тоже, критика и дополнения приветствуются т.к. он незнаконченный (введение смешное, его писали больше знакомые чем я. Я бы написал серьёзно): http://www.hnng.moe/f/JOq
Я вижу что и у тебя и у меня высокоуровневое поведение генерируется нейросетью. Я планировал влепить туда LSTM-нейросеть и натренировать на примерах правильного поведения, хотя и понимал что такой подход встретит кучу проблем.
Основные проблемы с которыми я столкнулся до того как отложил это дело были:
1) Правильная, не слишком грубая и не слишком сложная формализация интерфейса между роботом и его software и управляющей нейросетью (а может и не нейросетью а более простой моделью поведения)
2) Как моделировать всю систему, на каком уровне абстракций (в документе несколько вариантов предложено)
3) Как обучать такую систему, откуда брать данные правильных примеров поведения для обучения. Я думал что мне аноны помогут играя с симулятором сгенерить эти данные, но до дела не дошло.
Интересно что ты, анон, думаешь об этих проблемах, важны ли они, есть ли другие проблемы, как и в каком виде их решать.
Хорошая схема!
Видно что ты понимаешь что почти все роботы так устроены - есть микроконтроллер или просто отдельный процессор под управлением RTOS или голой прошивки, он подключён к сенсорами и актуаторам напрямую и выполняет критические задачи реального времени - вычисление контроллеров приводов, балансирование робота, опрос сенсорос - в цикле с частотой где-то 1000 герц.
А рядом стоит обычный компьютер под управлением обычной ОС, и он по последовательному интерфейсу типа Ethernet отправляет команды и получает данные из системы реального времени.
На этом компьютере уже крутятся прикладные программы - Speech To Text, Text To Speech, Распознавание образов, биометрический замок на хозяина, модель поведения.
Хммм, я сам в одном неоконченном документе похожую схему рисовал - пикрелейтейд. Но там аппаратная часть не показана. Кстати документ можешь почитать тоже, критика и дополнения приветствуются т.к. он незнаконченный (введение смешное, его писали больше знакомые чем я. Я бы написал серьёзно): http://www.hnng.moe/f/JOq
Я вижу что и у тебя и у меня высокоуровневое поведение генерируется нейросетью. Я планировал влепить туда LSTM-нейросеть и натренировать на примерах правильного поведения, хотя и понимал что такой подход встретит кучу проблем.
Основные проблемы с которыми я столкнулся до того как отложил это дело были:
1) Правильная, не слишком грубая и не слишком сложная формализация интерфейса между роботом и его software и управляющей нейросетью (а может и не нейросетью а более простой моделью поведения)
2) Как моделировать всю систему, на каком уровне абстракций (в документе несколько вариантов предложено)
3) Как обучать такую систему, откуда брать данные правильных примеров поведения для обучения. Я думал что мне аноны помогут играя с симулятором сгенерить эти данные, но до дела не дошло.
Интересно что ты, анон, думаешь об этих проблемах, важны ли они, есть ли другие проблемы, как и в каком виде их решать.
>>315927
Так как твоя схема похожа на мою, давай я позадаю вопросы:
1) Правильно ли я понимаю что аппаратно система разделена на механику/сенсоры, микроконтроллер с RTOS и обычный компьютер на котором крутятся все приложения (ну может с частью в облаке ещё, хотя опустим это для начала) ?
2) На уровне контроллера реализовано управление низкоуровневыми траекториями серв, ПИД-контроллеры (или какие-то другие контроллеры), балансировка ходячего робота по модели обратного маятника, адаптирование ног к углам поверхности и мелким неровностям, хождение, восстановление после падения, обхождение 3д-препятствий, ну и чтение сенсоров (кстати менее реалтайм сенсоры вроде микрофонов и камер подключены прямо к ПК, это разумно тоже выглядит)?
3) На ПК работает несколько процессов которые принимают сырую информацию из камер и микрофона и формируют по ним высокоуровневое описание сцены, состояния тела робота (что робот видит, какие слова ему сказали). В другом процессе вычисляется похожее, но в обратном направлении - из высокоуровневого описания в моторные команды (например из библиотеки простых движений), и в конечном счёте в простые моторные команды для контроллера ?
4) Нейросеть просто отображает входные высокоуровневые описания в выходные высокоуровневые описания действий ?
Так как твоя схема похожа на мою, давай я позадаю вопросы:
1) Правильно ли я понимаю что аппаратно система разделена на механику/сенсоры, микроконтроллер с RTOS и обычный компьютер на котором крутятся все приложения (ну может с частью в облаке ещё, хотя опустим это для начала) ?
2) На уровне контроллера реализовано управление низкоуровневыми траекториями серв, ПИД-контроллеры (или какие-то другие контроллеры), балансировка ходячего робота по модели обратного маятника, адаптирование ног к углам поверхности и мелким неровностям, хождение, восстановление после падения, обхождение 3д-препятствий, ну и чтение сенсоров (кстати менее реалтайм сенсоры вроде микрофонов и камер подключены прямо к ПК, это разумно тоже выглядит)?
3) На ПК работает несколько процессов которые принимают сырую информацию из камер и микрофона и формируют по ним высокоуровневое описание сцены, состояния тела робота (что робот видит, какие слова ему сказали). В другом процессе вычисляется похожее, но в обратном направлении - из высокоуровневого описания в моторные команды (например из библиотеки простых движений), и в конечном счёте в простые моторные команды для контроллера ?
4) Нейросеть просто отображает входные высокоуровневые описания в выходные высокоуровневые описания действий ?

>>316042
Понюхать писечку, полизать попочку. Все в мире ради этого.
Понюхать писечку, полизать попочку. Все в мире ради этого.
>>316042
Творчество жи. А если ты такой нивроибаццо прагматик, то даже в форме "бесполезных" игрушек они нарабатывают технологии. И када завезут кероши аккумуляторы с "умными" алгоритмами, они будут готовы изготовить Йобу. Впрочем, и щас можно, при хорошем усердии.
Творчество жи. А если ты такой нивроибаццо прагматик, то даже в форме "бесполезных" игрушек они нарабатывают технологии. И када завезут кероши аккумуляторы с "умными" алгоритмами, они будут готовы изготовить Йобу. Впрочем, и щас можно, при хорошем усердии.
>>315824
Обычная прюша с довольно хуевой точностью, но думаю руку получится напечатать.
Обычная прюша с довольно хуевой точностью, но думаю руку получится напечатать.
>>315955
1) Предлагаю строить связь по типу сообщений.
Что-то вроде:
->> [поднять руку; улыбнуться]
<<- [прикосновение(xyz…), давление(abc)]
Остальное вечером допишу или завтра. Заодно и подумаю.
1) Предлагаю строить связь по типу сообщений.
Что-то вроде:
->> [поднять руку; улыбнуться]
<<- [прикосновение(xyz…), давление(abc)]
Остальное вечером допишу или завтра. Заодно и подумаю.
>>315955
Вот ещё мюсли.
>2) Как моделировать всю систему, на каком уровне абстракций (в документе несколько вариантов предложено)
Систему надо моделировать на всех уровнях абстракции. Каждый прямоугольник на схемах разворачивается в не менее сложную схему. В идеале надо дойти до уровня отдельных функций (в программах) и отдельных деталей (в железе).
>3) Как обучать такую систему, откуда брать данные правильных примеров поведения для обучения. Я думал что мне аноны помогут играя с симулятором сгенерить эти данные, но до дела не дошло.
Для начала нужна некая база данных с паттернами поведения. Писать можно хоть в блокноте на русском. Формализация потом.
Вот ещё мюсли.
>2) Как моделировать всю систему, на каком уровне абстракций (в документе несколько вариантов предложено)
Систему надо моделировать на всех уровнях абстракции. Каждый прямоугольник на схемах разворачивается в не менее сложную схему. В идеале надо дойти до уровня отдельных функций (в программах) и отдельных деталей (в железе).
>3) Как обучать такую систему, откуда брать данные правильных примеров поведения для обучения. Я думал что мне аноны помогут играя с симулятором сгенерить эти данные, но до дела не дошло.
Для начала нужна некая база данных с паттернами поведения. Писать можно хоть в блокноте на русском. Формализация потом.
,fvg
>>316867
>Для начала нужна некая база данных с паттернами поведения. Писать можно хоть в блокноте на русском. Формализация потом.
Ну да, мы так и начинали, но что-то фантазии у анонов не было. Я искал анонов-писателей, но как-то не срослось.
Думал ещё что в симуляторе можно быстроенько эти ситуации описывать.
>Для начала нужна некая база данных с паттернами поведения. Писать можно хоть в блокноте на русском. Формализация потом.
Ну да, мы так и начинали, но что-то фантазии у анонов не было. Я искал анонов-писателей, но как-то не срослось.
Думал ещё что в симуляторе можно быстроенько эти ситуации описывать.

>>317125
У меня нету отторжения от "зловещей долины", но я всё равно считаю что практичнее пока что делать более спокойные роботные дизайны тела, как пикрелейтед.
Лучше чтобы робот был для покупателя красивой дорогой хай-тек игрушкой чем пародией на человека.
У меня нету отторжения от "зловещей долины", но я всё равно считаю что практичнее пока что делать более спокойные роботные дизайны тела, как пикрелейтед.
Лучше чтобы робот был для покупателя красивой дорогой хай-тек игрушкой чем пародией на человека.
>>317651
Мне бы хотелось робожену несколько отличающуюся от обычной человеческой анотомии лица и тела. Это романтичнее.
Мне бы хотелось робожену несколько отличающуюся от обычной человеческой анотомии лица и тела. Это романтичнее.
>>317651
Я тоже так считаю, вся эта система для мимики занимает непозволительно много полезного места. Но в этом есть основная фича этого робота.
Я тоже так считаю, вся эта система для мимики занимает непозволительно много полезного места. Но в этом есть основная фича этого робота.
Я живу уже в то время, когда можно влюбиться в свою робожену созданную по индивидуальному проекту. Настолько высок уровень возможностей. Вот круто то!

>>315973
>1) Правильно ли я понимаю что аппаратно система разделена на механику/сенсоры, микроконтроллер с RTOS и обычный компьютер на котором крутятся все приложения (ну может с частью в облаке ещё, хотя опустим это для начала) ?
Я представляю две основные части: "тело" и "мозги". К телу относится механическая часть и специфические датчики. Оно управляется микропроцессором в реальном времени. Некоторые исполнительные устройства могут иметь свои контроллеры со своей прошивкой, но это уже частности. Мозги - компьютер с обычной достаточно надёжной операционкой, на которой крутится интеллектуальная часть. К "мозгу" же подключены и устройства ввода-вывода, отвечающие за информационное взаимодействие с окружающим миром и пользователем. Две системы связаны друг с другом через последовательный интерфейс (или даже два). RTOS отправляет мозгам только те данные с датчиков, которые нужны им для работы. Комп отправляет на RTOS команды, в основном движения. Обмен данными может идти по схеме запрос-ответ, где линуксовый комп будет мастером, а RTOS - слейвом.
>2) На уровне контроллера реализовано управление низкоуровневыми траекториями серв, ПИД-контроллеры (или какие-то другие контроллеры), балансировка ходячего робота по модели обратного маятника, адаптирование ног к углам поверхности и мелким неровностям, хождение, восстановление после падения, обхождение 3д-препятствий, ну и чтение сенсоров (кстати менее реалтайм сенсоры вроде микрофонов и камер подключены прямо к ПК, это разумно тоже выглядит)?
Обход препятствий и поиск путей разумнее расположить на мощном компе, нужно много ресурсов. Контроллеру лучше просто избегать столкновений.
>3) На ПК работает несколько процессов которые принимают сырую информацию из камер и микрофона и формируют по ним высокоуровневое описание сцены, состояния тела робота (что робот видит, какие слова ему сказали). В другом процессе вычисляется похожее, но в обратном направлении - из высокоуровневого описания в моторные команды (например из библиотеки простых движений), и в конечном счёте в простые моторные команды для контроллера ?
Мне кажется, что комп должен выдавать контроллеру последовательности простых движений. Библиотеку с реализациями этих движений лучше хранить на стороне RTOS, поскольку она представляет собой простые наборы более элементарных команд.
>4) Нейросеть просто отображает входные высокоуровневые описания в выходные высокоуровневые описания действий ?
Да, только к нейросети нужны обработчки данных, которые представят данные в формате, удобном для сети и преобразуют выходы сети во что-то внятное. Кстати, скорее всего там будет несколько таких нейросетевых модулей, связанных друг с другом.
>1) Правильно ли я понимаю что аппаратно система разделена на механику/сенсоры, микроконтроллер с RTOS и обычный компьютер на котором крутятся все приложения (ну может с частью в облаке ещё, хотя опустим это для начала) ?
Я представляю две основные части: "тело" и "мозги". К телу относится механическая часть и специфические датчики. Оно управляется микропроцессором в реальном времени. Некоторые исполнительные устройства могут иметь свои контроллеры со своей прошивкой, но это уже частности. Мозги - компьютер с обычной достаточно надёжной операционкой, на которой крутится интеллектуальная часть. К "мозгу" же подключены и устройства ввода-вывода, отвечающие за информационное взаимодействие с окружающим миром и пользователем. Две системы связаны друг с другом через последовательный интерфейс (или даже два). RTOS отправляет мозгам только те данные с датчиков, которые нужны им для работы. Комп отправляет на RTOS команды, в основном движения. Обмен данными может идти по схеме запрос-ответ, где линуксовый комп будет мастером, а RTOS - слейвом.
>2) На уровне контроллера реализовано управление низкоуровневыми траекториями серв, ПИД-контроллеры (или какие-то другие контроллеры), балансировка ходячего робота по модели обратного маятника, адаптирование ног к углам поверхности и мелким неровностям, хождение, восстановление после падения, обхождение 3д-препятствий, ну и чтение сенсоров (кстати менее реалтайм сенсоры вроде микрофонов и камер подключены прямо к ПК, это разумно тоже выглядит)?
Обход препятствий и поиск путей разумнее расположить на мощном компе, нужно много ресурсов. Контроллеру лучше просто избегать столкновений.
>3) На ПК работает несколько процессов которые принимают сырую информацию из камер и микрофона и формируют по ним высокоуровневое описание сцены, состояния тела робота (что робот видит, какие слова ему сказали). В другом процессе вычисляется похожее, но в обратном направлении - из высокоуровневого описания в моторные команды (например из библиотеки простых движений), и в конечном счёте в простые моторные команды для контроллера ?
Мне кажется, что комп должен выдавать контроллеру последовательности простых движений. Библиотеку с реализациями этих движений лучше хранить на стороне RTOS, поскольку она представляет собой простые наборы более элементарных команд.
>4) Нейросеть просто отображает входные высокоуровневые описания в выходные высокоуровневые описания действий ?
Да, только к нейросети нужны обработчки данных, которые представят данные в формате, удобном для сети и преобразуют выходы сети во что-то внятное. Кстати, скорее всего там будет несколько таких нейросетевых модулей, связанных друг с другом.
Предлагаю прототип: одноплатный компьютер на подвижной платформе , который умеет распознавать образы и речь и выполнять команды. Ну и еще к нему манипулятор приделать.
Может конфу запилить?
Тред не читал. Посоны почему никто не предложил вместо моторчиков использовать леску?
>>319710
Леску надо нагревать, чтобы она сжалась, это неудобно из-за низкой скорости. Уж лучше пневматические мышцы.
Леску надо нагревать, чтобы она сжалась, это неудобно из-за низкой скорости. Уж лучше пневматические мышцы.
>>318477
Я тоже такое собрался делать, но железо это долго и у многих его нету, лучше сначала в симуляторе то же самое сделать, я считаю.
Я тоже такое собрался делать, но железо это долго и у многих его нету, лучше сначала в симуляторе то же самое сделать, я считаю.



>>317651
Удвою этого безумного инженера, не стоит пытаться максимально приблизить облик робота к человеческому. По крайней мере, до тех пор, пока мы не сможем их сделать абсолютно неотличимыми. Но и тогда должен быть выбор.
Да и вообще, футуристичный дизайн - это заебись.
Удвою этого безумного инженера, не стоит пытаться максимально приблизить облик робота к человеческому. По крайней мере, до тех пор, пока мы не сможем их сделать абсолютно неотличимыми. Но и тогда должен быть выбор.
Да и вообще, футуристичный дизайн - это заебись.



>>322676
Это же Пселл, мать ее за ногу.
Это же Пселл, мать ее за ногу.
Оп, а ты подумал, что линзочки надо будет сделать двигающимися, как здесь.
>>317275
+ если посмотреть на рот, то можно охуеть. Придётся создавать мимику под издаваемые звуки или копировать связки и остальные языки. Можно эмулировать дыхание кулерами и нагревать тело.
Вся тян будет потреблять много электро энергии. Поэтому следует сделать что типа режима энергосбережения и использовать его когда человек спит. В это время rtos отключит нейросеть. Включит в назначенное время или когда тело будут "будить".
Чтобы нейросеть быстро запускалась можно монтировать всё в tmpfs, а на жёсткий диск делать снапшоты/бэкапы каждый 3 часа/день.
>>317275
+ если посмотреть на рот, то можно охуеть. Придётся создавать мимику под издаваемые звуки или копировать связки и остальные языки. Можно эмулировать дыхание кулерами и нагревать тело.
Вся тян будет потреблять много электро энергии. Поэтому следует сделать что типа режима энергосбережения и использовать его когда человек спит. В это время rtos отключит нейросеть. Включит в назначенное время или когда тело будут "будить".
Чтобы нейросеть быстро запускалась можно монтировать всё в tmpfs, а на жёсткий диск делать снапшоты/бэкапы каждый 3 часа/день.
>>320754
Мимику, например, электромышцами гораздо проще сделать.
Мимику, например, электромышцами гораздо проще сделать.
>>300764
А зойчем пилить робовайфу, если это уже сделали для нас добрые китайцы?
А зойчем пилить робовайфу, если это уже сделали для нас добрые китайцы?
>>324942
Для некоторых это мечта. Скорее всего неосуществимая. Вот и всё.
Для некоторых это мечта. Скорее всего неосуществимая. Вот и всё.
Посоны а реально вообще зделоть нейронную сеть которая будет допиливать сама себя?
Тоесть по сути исскуственный разум который разовьется в человеческий
Тоесть по сути исскуственный разум который разовьется в человеческий

Робовайфу 1.0
>>325416
Вот вы обсуждаете это как простую вайфу, а я вот задумался.
В космосе дохуя металов и просто редких веществ.
Жизнеспособность человека устроить очень трудно, но робота же по сути можно собрать с помойки и алиэксперса (или нет?)
Создаем робота. Создаем ракету. Отправляем его за металом. Он привозит.
Продаем метал, на заработанные деньги превращаем себя в киборга.
Проворачиваем схему с металом овер9000 раз, на полученные деньги превращаем себя в саморазрастающийся мозг из плазмы, колонизируем планету - живем вечно.
Вот вы обсуждаете это как простую вайфу, а я вот задумался.
В космосе дохуя металов и просто редких веществ.
Жизнеспособность человека устроить очень трудно, но робота же по сути можно собрать с помойки и алиэксперса (или нет?)
Создаем робота. Создаем ракету. Отправляем его за металом. Он привозит.
Продаем метал, на заработанные деньги превращаем себя в киборга.
Проворачиваем схему с металом овер9000 раз, на полученные деньги превращаем себя в саморазрастающийся мозг из плазмы, колонизируем планету - живем вечно.
>>325434
Вайфу на ардуино. Спасибо что не часы и не такпик за 200 баксов
Вайфу на ардуино. Спасибо что не часы и не такпик за 200 баксов
>>325454
Используя бессконечные возможности своего интелекта - создаем аватаров себя, и отправляем исследовать вселенную.
Живя сотней жизней одновременно в разных мирах.
Ух.
Используя бессконечные возможности своего интелекта - создаем аватаров себя, и отправляем исследовать вселенную.
Живя сотней жизней одновременно в разных мирах.
Ух.
>>325416
В развитии нейронных сетей сейчас такой этап, когда ещё нет устоявшихся готовых продуктов, а вкатиться может любой при желании. У тебя есть шанс.
В развитии нейронных сетей сейчас такой этап, когда ещё нет устоявшихся готовых продуктов, а вкатиться может любой при желании. У тебя есть шанс.

>>322672
Планируется гуманоидная форма, а какой силикон лить - дело десятое.
Планируется гуманоидная форма, а какой силикон лить - дело десятое.
>>325537
Мы не знаем других разумов кроме человеческого.
И вообразить не можем.
Очевидно же что нейросеть будет развиваться под влиянием нашей культуры и никакой больше.
Это будет человек
Мы не знаем других разумов кроме человеческого.
И вообразить не можем.
Очевидно же что нейросеть будет развиваться под влиянием нашей культуры и никакой больше.
Это будет человек
>>325622
Отличающемуся телу соответствует совсем другая психика.
Отличающемуся телу соответствует совсем другая психика.
>>326028
У нас же будет гуманойд с ии основаном на человекоподобным нейроным сетям
У нас же будет гуманойд с ии основаном на человекоподобным нейроным сетям
>>326168
Так его намеренно будут подгонять под человеческое поведение.
Так его намеренно будут подгонять под человеческое поведение.
>>324942
Тупой, подушка с дыркой и механическая прислуга это две разных вещи.
Тупой, подушка с дыркой и механическая прислуга это две разных вещи.


>>317678
Минимальную мимику можно сделать, рот там, язык, глаза. На это всё уйдёт ~8 степеней свободы, это терпимо,
Я говорю о дизайне в целом, пластиковое тело неплохо смотрится, и при этом относительно простое и дёшевое.
Когда будет рабтоспособные модели такого вида где все баги отлажены, тогда уже можно будет задуматься о добавлении человекоподобной оболочки.
Минимальную мимику можно сделать, рот там, язык, глаза. На это всё уйдёт ~8 степеней свободы, это терпимо,
Я говорю о дизайне в целом, пластиковое тело неплохо смотрится, и при этом относительно простое и дёшевое.
Когда будет рабтоспособные модели такого вида где все баги отлажены, тогда уже можно будет задуматься о добавлении человекоподобной оболочки.
А что там с опенсорсными TTS? Из живых помню только festival. На ангельском он ещё нормально говорит, но русская речь огорчает.
>>326300
Короче палю годноту - пока плохо дело с ИИ - нужно запилить соцсеть с возможностью быть ламповой няшей для анона по выбору по удалёнке ! Желающий побыть ламповой няшей одевает набор из очков, перкаток и прочее.
короче гугли киношку - СУРРОГАТЫ или ГЕЙМЕР !
основная проблема сейчас - наладить дешёвое серийное производство няшных робокукол с дистанционным управлением.
Короче палю годноту - пока плохо дело с ИИ - нужно запилить соцсеть с возможностью быть ламповой няшей для анона по выбору по удалёнке ! Желающий побыть ламповой няшей одевает набор из очков, перкаток и прочее.
короче гугли киношку - СУРРОГАТЫ или ГЕЙМЕР !
основная проблема сейчас - наладить дешёвое серийное производство няшных робокукол с дистанционным управлением.
>>326325
Нашёл ещё MaryTTS. Проект жив, есть женские русские голоса. Работает на java как сервер. Пока что самый перспективный вариант.
Нашёл ещё MaryTTS. Проект жив, есть женские русские голоса. Работает на java как сервер. Пока что самый перспективный вариант.
>>326796
>>326325
Я испытывал этот, вроде приемлимый http://www.festvox.org/flite/
Списки разных полезных библиотек и программ можно найти в конце документа http://www.hnng.moe/f/JOq
>>326325
Я испытывал этот, вроде приемлимый http://www.festvox.org/flite/
Списки разных полезных библиотек и программ можно найти в конце документа http://www.hnng.moe/f/JOq
>>326532
донат твой !
у тебя по любому бесплатно не получится. считай это довесок к счёту за электричество.
донат твой !
у тебя по любому бесплатно не получится. считай это довесок к счёту за электричество.
>>326810
Там русский голос убогий и с кауказким акцентом же. Или есть ещё какой-то?
Там русский голос убогий и с кауказким акцентом же. Или есть ещё какой-то?
>>318212
>Обход препятствий и поиск путей разумнее расположить на мощном компе, нужно много ресурсов. Контроллеру лучше просто избегать столкновений.
С этим согласен, задача планирования траекторий тяжёлая. Но вот задача балансирования обратного маятника относительно простая и требует 1000 гц цикла.
>Мне кажется, что комп должен выдавать контроллеру последовательности простых движений. Библиотеку с реализациями этих движений лучше хранить на стороне RTOS, поскольку она представляет собой простые наборы более элементарных команд.
Это нормально, но будет работать только с командами которые не реагируют на внешний мир. Много ли таких..
>Да, только к нейросети нужны обработчки данных, которые представят данные в формате, удобном для сети и преобразуют выходы сети во что-то внятное. Кстати, скорее всего там будет несколько таких нейросетевых модулей, связанных друг с другом.
Ну, тоесть энкодеры и декодеры. "Несколько нейросетей" это видимо внутри, например, энкодера визуальных данных? Мне кажется для генерации высокоуровневного поведения надо одну модель.
>>322830
>В это время rtos отключит нейросеть. Включит в назначенное время или когда тело будут "будить".
Чтобы нейросеть быстро запускалась можно монтировать всё в tmpfs, а на жёсткий диск делать снапшоты/бэкапы каждый 3 часа/день.
Да там основными потребитель энергии будут сервоприводы. Нейросеть кстати не боготворите, это просто функция из массива вещественных чисел в массив вещественных чисел, с набором параметров. Вопрос в том на чём её тренировать.
>>325416
Это уже вопрос создания ИИ общего назначения, это не тема для этого треда (можешь создать отдельную), да и этим занимаются крупные отделы топовых корпораций с лучшими докторами наук - Google Deepmind, Facebook AI Research, OpenAI, GoodAI etc
>Обход препятствий и поиск путей разумнее расположить на мощном компе, нужно много ресурсов. Контроллеру лучше просто избегать столкновений.
С этим согласен, задача планирования траекторий тяжёлая. Но вот задача балансирования обратного маятника относительно простая и требует 1000 гц цикла.
>Мне кажется, что комп должен выдавать контроллеру последовательности простых движений. Библиотеку с реализациями этих движений лучше хранить на стороне RTOS, поскольку она представляет собой простые наборы более элементарных команд.
Это нормально, но будет работать только с командами которые не реагируют на внешний мир. Много ли таких..
>Да, только к нейросети нужны обработчки данных, которые представят данные в формате, удобном для сети и преобразуют выходы сети во что-то внятное. Кстати, скорее всего там будет несколько таких нейросетевых модулей, связанных друг с другом.
Ну, тоесть энкодеры и декодеры. "Несколько нейросетей" это видимо внутри, например, энкодера визуальных данных? Мне кажется для генерации высокоуровневного поведения надо одну модель.
>>322830
>В это время rtos отключит нейросеть. Включит в назначенное время или когда тело будут "будить".
Чтобы нейросеть быстро запускалась можно монтировать всё в tmpfs, а на жёсткий диск делать снапшоты/бэкапы каждый 3 часа/день.
Да там основными потребитель энергии будут сервоприводы. Нейросеть кстати не боготворите, это просто функция из массива вещественных чисел в массив вещественных чисел, с набором параметров. Вопрос в том на чём её тренировать.
>>325416
Это уже вопрос создания ИИ общего назначения, это не тема для этого треда (можешь создать отдельную), да и этим занимаются крупные отделы топовых корпораций с лучшими докторами наук - Google Deepmind, Facebook AI Research, OpenAI, GoodAI etc
>>326168
>с ии основаном на человекоподобным нейроным сетям
Хех, не путай реально существующие "Искусственные Нейросети" и реальные биологические нейросети, в них общие только самые общие архитектурные особенности, всё остальное отличается.
С другой стороны конечно если ты тренируешь нейросеть на примерах полученных от людей то она научится их хорошо имитировать.
>с ии основаном на человекоподобным нейроным сетям
Хех, не путай реально существующие "Искусственные Нейросети" и реальные биологические нейросети, в них общие только самые общие архитектурные особенности, всё остальное отличается.
С другой стороны конечно если ты тренируешь нейросеть на примерах полученных от людей то она научится их хорошо имитировать.
>>326903
>задача балансирования обратного маятника
Там будет более сложный алгоритм. С первого взгляда понятно, что тело человека не подходит под обычный обратный маятник.
>"Несколько нейросетей" это видимо внутри, например, энкодера визуальных данных?
Например, нейросеть, распознающая образы передаёт данные о том, какие объекты видит камера к главной сети, отвечающей за поведение. Мне кажется, что такое разделение сделает задачу намного проще, а поведение итогового алгоритма станет понятнее.
>задача балансирования обратного маятника
Там будет более сложный алгоритм. С первого взгляда понятно, что тело человека не подходит под обычный обратный маятник.
>"Несколько нейросетей" это видимо внутри, например, энкодера визуальных данных?
Например, нейросеть, распознающая образы передаёт данные о том, какие объекты видит камера к главной сети, отвечающей за поведение. Мне кажется, что такое разделение сделает задачу намного проще, а поведение итогового алгоритма станет понятнее.
>>327086
>Там будет более сложный алгоритм. С первого взгляда понятно, что тело человека не подходит под обычный обратный маятник.
Во всё что сильно сложнее и ближе к человеку чем обратный маятник уже слабо верится (для нас), надо понимать пределы своих возможностей.
Преимущество обратного маятника в том что он уже готов - применяется в ASIMO, ATLAS, даже в ATLAS nextgen сильно улучшенная версия подобного контроллера.
Правда надо ещё помнить что там обычно обратный маятник + алгоритм ZMP.
>Например, нейросеть, распознающая образы передаёт данные о том, какие объекты видит камера к главной сети, отвечающей за поведение. Мне кажется, что такое разделение сделает задачу намного проще, а поведение итогового алгоритма станет понятнее.
Да-да, это понятно. Обычно такое делают передавая вектор содержащий сжатую информацию о картинке, который получается срезанием с обычной convnet последнего слоя. Хотя можно и оставить слой, тогда там уже будут вероятности тех или иных объектов.
Правда тут есть большая тонкость между информацией о том какой объект и где он.
>Там будет более сложный алгоритм. С первого взгляда понятно, что тело человека не подходит под обычный обратный маятник.
Во всё что сильно сложнее и ближе к человеку чем обратный маятник уже слабо верится (для нас), надо понимать пределы своих возможностей.
Преимущество обратного маятника в том что он уже готов - применяется в ASIMO, ATLAS, даже в ATLAS nextgen сильно улучшенная версия подобного контроллера.
Правда надо ещё помнить что там обычно обратный маятник + алгоритм ZMP.
>Например, нейросеть, распознающая образы передаёт данные о том, какие объекты видит камера к главной сети, отвечающей за поведение. Мне кажется, что такое разделение сделает задачу намного проще, а поведение итогового алгоритма станет понятнее.
Да-да, это понятно. Обычно такое делают передавая вектор содержащий сжатую информацию о картинке, который получается срезанием с обычной convnet последнего слоя. Хотя можно и оставить слой, тогда там уже будут вероятности тех или иных объектов.
Правда тут есть большая тонкость между информацией о том какой объект и где он.
>>327163
Вот тут уже надо задуматься, как передать столько разнородных данных сетке. Вариантов можно придумать достаточно, но скорее всего потребуются эксперименты. Lazagne расчехлить что ли…
Вот тут уже надо задуматься, как передать столько разнородных данных сетке. Вариантов можно придумать достаточно, но скорее всего потребуются эксперименты. Lazagne расчехлить что ли…
>>327304
>Я не понял. Нейросети требует больших затрат на стадии компиляции или работы? Почему на харкаче в треде про нейросети постят видеокарты ?
На стадии тренировки требуются большие ресурсы, и для больших задач тренировка может занимать недели. На стадии работы считать можно на чём угодно, но на процессоре получится всего несколько раз в секунду, лучше мелкую видеокарту в роботе иметь и на ней это делать.
>Посоветуйте литературы / статей наверное.
Ох, там много. Ты английский-то знаешь? Наверное нет, а по-русски я про машинное обучение не читаю.
Ну вроде чего-то на хабраче переводят, можно это читать https://habrahabr.ru/post/305578/
https://habrahabr.ru/company/meanotek/blog/271053/
>Я не понял. Нейросети требует больших затрат на стадии компиляции или работы? Почему на харкаче в треде про нейросети постят видеокарты ?
На стадии тренировки требуются большие ресурсы, и для больших задач тренировка может занимать недели. На стадии работы считать можно на чём угодно, но на процессоре получится всего несколько раз в секунду, лучше мелкую видеокарту в роботе иметь и на ней это делать.
>Посоветуйте литературы / статей наверное.
Ох, там много. Ты английский-то знаешь? Наверное нет, а по-русски я про машинное обучение не читаю.
Ну вроде чего-то на хабраче переводят, можно это читать https://habrahabr.ru/post/305578/
https://habrahabr.ru/company/meanotek/blog/271053/
Шел мимо и заметил, что вы задвигаете за нейронные сети. Кто-то может сказать почему их кодируют чаще всего на пфайтоне, а не на R, например?
>>327238
>но скорее всего потребуются эксперименты.
Да, никуда от них не уйдём. Думал я над этим много. В идеале было бы здорово обучать модель (агента, нейросеть) в режиме обучения с подкреплением, но это нереально для такого сложного робота (даже передний край науки сейчас обучает только самых простых роботов).
Мне кажется реальный вариант это обучать LSTM-нейросеть или подобную ей в режиме Seq2Seq, но даже это потребует очень много данных правильного поведения.
Размерность векторов входа и выхода лучше не делать выше 200, а то медленно всё будет.
Я раньше думал сделать простой симулятор с абстрактной моделью робота, вроде майнкрафта, и накидать в нём пару десятков ситуаций, потом натренировать LSTM на них, посмотреть как оно будет обобщать.
Ещё планировал программно эти ситуации генерить, чтобы больше тренировочных данных получать.
Я считаю в этом проекте нельзя полностью надеяться на нейросеть в качестве модели поведения, ибо технология пока слишком неточная и имеет ряд недостатков.
Но альтернативные варианты без обучения выглядят возможно ещё хуже, набор правил который редактируют трудолюбивые сценаристы.
>но скорее всего потребуются эксперименты.
Да, никуда от них не уйдём. Думал я над этим много. В идеале было бы здорово обучать модель (агента, нейросеть) в режиме обучения с подкреплением, но это нереально для такого сложного робота (даже передний край науки сейчас обучает только самых простых роботов).
Мне кажется реальный вариант это обучать LSTM-нейросеть или подобную ей в режиме Seq2Seq, но даже это потребует очень много данных правильного поведения.
Размерность векторов входа и выхода лучше не делать выше 200, а то медленно всё будет.
Я раньше думал сделать простой симулятор с абстрактной моделью робота, вроде майнкрафта, и накидать в нём пару десятков ситуаций, потом натренировать LSTM на них, посмотреть как оно будет обобщать.
Ещё планировал программно эти ситуации генерить, чтобы больше тренировочных данных получать.
Я считаю в этом проекте нельзя полностью надеяться на нейросеть в качестве модели поведения, ибо технология пока слишком неточная и имеет ряд недостатков.
Но альтернативные варианты без обучения выглядят возможно ещё хуже, набор правил который редактируют трудолюбивые сценаристы.
>>327353
Потому что python больше язык программирования чем R и в нём numpy высокопроизводительный есть.
Потому что python больше язык программирования чем R и в нём numpy высокопроизводительный есть.
>>327304
Кроме компиляции и работы есть ещё промежуточный этап - обучение. Он самый затратный. Но и работа тоже не слишком быстрая в сравнении с некоторыми другими алгоритмами.
>>327353
Потому что питон прост в изучении, имеет хорошие математические библиотеки, кроссплатформенный. К тому же, для питона есть Theano, что даёт возможность совместить сишную скорость с питоновой простотой и гибкостью.
>>327363
>нельзя полностью надеяться на нейросеть в качестве модели поведения
This. Ситуации, которые требуют однозначной или однозначно определенной вероятностной реакции должны обрабатываться строгим алгоритмом. Таким образом, можно будет разгрузить нейросеть, поскольку таких ситуаций больше всего. Вот обучение нейросети во время работы вызывает у меня сомнения, очень часто предостерегают от такого, думаю, что не зря. Обучение нейросети во время использования можно было бы заменить коррекцией и дополнением базы данных кибертян.
Кроме компиляции и работы есть ещё промежуточный этап - обучение. Он самый затратный. Но и работа тоже не слишком быстрая в сравнении с некоторыми другими алгоритмами.
>>327353
Потому что питон прост в изучении, имеет хорошие математические библиотеки, кроссплатформенный. К тому же, для питона есть Theano, что даёт возможность совместить сишную скорость с питоновой простотой и гибкостью.
>>327363
>нельзя полностью надеяться на нейросеть в качестве модели поведения
This. Ситуации, которые требуют однозначной или однозначно определенной вероятностной реакции должны обрабатываться строгим алгоритмом. Таким образом, можно будет разгрузить нейросеть, поскольку таких ситуаций больше всего. Вот обучение нейросети во время работы вызывает у меня сомнения, очень часто предостерегают от такого, думаю, что не зря. Обучение нейросети во время использования можно было бы заменить коррекцией и дополнением базы данных кибертян.
>>327365
В R очень много годных пактов, проблема в другом. Возможно R хуже подходит для действий с матрицами и я не понимаю почему
В R очень много годных пактов, проблема в другом. Возможно R хуже подходит для действий с матрицами и я не понимаю почему
>>327398
>Потому что питон прост в изучении, имеет хорошие математические библиотеки, кроссплатформенный. К тому же, для питона есть Theano, что даёт возможность совместить сишную скорость с питоновой простотой и гибкостью.
Все это можно сказать и про R(совсем простой язык для статистических вычислений), к которому большинство признанных пакетов тоже написаны на си
>Потому что питон прост в изучении, имеет хорошие математические библиотеки, кроссплатформенный. К тому же, для питона есть Theano, что даёт возможность совместить сишную скорость с питоновой простотой и гибкостью.
Все это можно сказать и про R(совсем простой язык для статистических вычислений), к которому большинство признанных пакетов тоже написаны на си
>>327402
R не используется программистами, он как язык программирования слаб. Пакеты там в основном для статистики. Вообще между статистикой и машинным обучением есть небольшое взаимное непонимание.
R не используется программистами, он как язык программирования слаб. Пакеты там в основном для статистики. Вообще между статистикой и машинным обучением есть небольшое взаимное непонимание.
>>327430
Вот из-за его простоты. Питоновскую программу можно сразу же использовать в деле. GUI, веб-фреймворки, вот это вот всё есть.
Вот из-за его простоты. Питоновскую программу можно сразу же использовать в деле. GUI, веб-фреймворки, вот это вот всё есть.
>>327398
>This. Ситуации, которые требуют однозначной или однозначно определенной вероятностной реакции должны обрабатываться строгим алгоритмом. Таким образом, можно будет разгрузить нейросеть, поскольку таких ситуаций больше всего. Вот обучение нейросети во время работы вызывает у меня сомнения, очень часто предостерегают от такого, думаю, что не зря. Обучение нейросети во время использования можно было бы заменить коррекцией и дополнением базы данных кибертян.
Вот я думаю может тупую версию вообще без нейросети делать или с тупой нейросетью которая просто будет натренирована на повторение простых примеров поведения.
>Вот обучение нейросети во время работы вызывает у меня сомнения
Это почти нереально с Seq2Seq, хотя в оффлайн-режиме раз в недельку реально. С Deep RL это совершенно реально, но Deep RL не подходит потому что слишком слаб пока для такой большой задачи.
> Обучение нейросети во время использования можно было бы заменить коррекцией и дополнением базы данных кибертян.
Вот именно, а база это в любом случае то на чём будет тренировка.
>This. Ситуации, которые требуют однозначной или однозначно определенной вероятностной реакции должны обрабатываться строгим алгоритмом. Таким образом, можно будет разгрузить нейросеть, поскольку таких ситуаций больше всего. Вот обучение нейросети во время работы вызывает у меня сомнения, очень часто предостерегают от такого, думаю, что не зря. Обучение нейросети во время использования можно было бы заменить коррекцией и дополнением базы данных кибертян.
Вот я думаю может тупую версию вообще без нейросети делать или с тупой нейросетью которая просто будет натренирована на повторение простых примеров поведения.
>Вот обучение нейросети во время работы вызывает у меня сомнения
Это почти нереально с Seq2Seq, хотя в оффлайн-режиме раз в недельку реально. С Deep RL это совершенно реально, но Deep RL не подходит потому что слишком слаб пока для такой большой задачи.
> Обучение нейросети во время использования можно было бы заменить коррекцией и дополнением базы данных кибертян.
Вот именно, а база это в любом случае то на чём будет тренировка.
>>327439
>R не используется программистами, он как язык программирования слаб.
Да, это более специализированный язык, но нельзя сказать, что он менее подходит для машинного обучения. Проблема в том, что для других методов ML он используется как минимум не реже чем остальные языки.
>>327458
Возможно. Хотя тоже есть фреймворк для создание вэб приложений.
Может когда сам нормально разберусь с нейронными сетями все сразу станет ясно
>R не используется программистами, он как язык программирования слаб.
Да, это более специализированный язык, но нельзя сказать, что он менее подходит для машинного обучения. Проблема в том, что для других методов ML он используется как минимум не реже чем остальные языки.
>>327458
Возможно. Хотя тоже есть фреймворк для создание вэб приложений.
Может когда сам нормально разберусь с нейронными сетями все сразу станет ясно
>>327510
Понимаешь, в машинном, в глубоком обучении ещё очень важна производительность, потому что задачи очень большие. К Питону просто и отработанно прилепление С-модулей, и вообще у тех самых рядовых программистов которые это всё ускоряют с питоном опыт уже есть.
Но впринципе можешь и на R делать, разницы кардинальной нету.
Это просто такой культурно-исторический момент. Python/Scipy/Numpy это такая открытая замена матлабу которая даже его в чём-то превзошла.
Понимаешь, в машинном, в глубоком обучении ещё очень важна производительность, потому что задачи очень большие. К Питону просто и отработанно прилепление С-модулей, и вообще у тех самых рядовых программистов которые это всё ускоряют с питоном опыт уже есть.
Но впринципе можешь и на R делать, разницы кардинальной нету.
Это просто такой культурно-исторический момент. Python/Scipy/Numpy это такая открытая замена матлабу которая даже его в чём-то превзошла.

Аноны, рекомендую вам посмотреть это пятисерийное OVA https://ru.wikipedia.org/wiki/Planetarian:_Chiisana_Hoshi_no_Yume
Там показан реалистичный пример рободевочки - не совсем тупой компьютер, но и не человек. Автономный продукт с некоторыми ограничениями по сравнению с человеком.
Там показан реалистичный пример рободевочки - не совсем тупой компьютер, но и не человек. Автономный продукт с некоторыми ограничениями по сравнению с человеком.
>>327575
Никогда не поздно научиться чему-то анон..
может ты со своим креативным бэкграундом привнесёшь что-то новое..
Никогда не поздно научиться чему-то анон..
может ты со своим креативным бэкграундом привнесёшь что-то новое..
>>327575
Просто берешь и становишься им. Все знания мира в паре движений мыши от тебя.
Хочешь изучить физику? Качай учебник, читай.
Хочешь программировать? Качай питон, пиши код.
Просто берешь и становишься им. Все знания мира в паре движений мыши от тебя.
Хочешь изучить физику? Качай учебник, читай.
Хочешь программировать? Качай питон, пиши код.
бамп
>>329421
Они там лентяи-обыватели, западным людям немного сложно понять предложение о том чтобы строить что-то. Их максимум это скриптик написать.
Они там лентяи-обыватели, западным людям немного сложно понять предложение о том чтобы строить что-то. Их максимум это скриптик написать.



Ох котаны, два дня не был, за субботу, ничего не сделал, за воскресенье написал игрульку на скратч "макака бегает за бананами", планирую к концу неделю закончить сратч(самоучитель не оче толстый) и перейти на пайтон, так же вчера смотрел КРУТЫЕ ВИДАСИКИ, на тему ардуины, вроде бы ничего сложного пока не заметил. Алсо, кто - нибудь доставит каналов, о программирование, нейронных сетях, машинном обучение и т.д.мне как всегда, как для мудаков и даунов Счастлив видеть вас целыми и с охуительно красивыми не совсем понятными схемами.
Б А Б
А Б Л
Б Л О
А Б Л
Б Л О
Думаю в недалёком будущем в качестве нейросети-контроллера верхнего уровня в роботах будет применяться это https://arxiv.org/abs/1610.09027

Робовайфу 1.1
>>329579
Программную часть верхнего уровня можно сделать совершенно без вложений.
Программную часть верхнего уровня можно сделать совершенно без вложений.
>>329556
Слушой, давай вместе изучать питон, а то мне в одиночку западло.
Слушой, давай вместе изучать питон, а то мне в одиночку западло.
>>331261
Да там и изучать особо нечего. Сам по себе питон простой. Вот библиотеки разные надо освоить. Для нейросетей лучше начать с numpy и pybrain.
Да там и изучать особо нечего. Сам по себе питон простой. Вот библиотеки разные надо освоить. Для нейросетей лучше начать с numpy и pybrain.
>>331356
Пасту про dive into python можно воспринимать как руководство к действию?
Пасту про dive into python можно воспринимать как руководство к действию?
>>331382
Если собираешься стать успешным фрилансером веб-разработчиком, то да.
Если собираешься стать успешным фрилансером веб-разработчиком, то да.
>>330889
Вау, я знаю эти сервы, у меня такие же лежат в коробочках и в ходячем роботе.
Эти HXT900 неплохие, но слабоваты, я ещё Corona 939MG использую там где больший момент нужен.
Кстати могу подогнать и ту и другую серву в виде Solidworks-моделей, сам штангенциркулем обмерял и моделировал.
Давай может обсудим как ты будешь управлять этим манипулятором? Инверсную кинематику прикрутить нужно.
>>332117
У меня нету телеграма и влом, он номер требует. Чего не скайп или дискорд. Да на самом деле и тут можно.
Вау, я знаю эти сервы, у меня такие же лежат в коробочках и в ходячем роботе.
Эти HXT900 неплохие, но слабоваты, я ещё Corona 939MG использую там где больший момент нужен.
Кстати могу подогнать и ту и другую серву в виде Solidworks-моделей, сам штангенциркулем обмерял и моделировал.
Давай может обсудим как ты будешь управлять этим манипулятором? Инверсную кинематику прикрутить нужно.
>>332117
У меня нету телеграма и влом, он номер требует. Чего не скайп или дискорд. Да на самом деле и тут можно.
>>332226
На самом деле не совсем удачная штука, я думаю, что где-то обосрался, потому что серва еле ворочает этим манипулятором. Может быть слишком слабая серва, или я собрал неправильно. Плюс я спалил одну. А как прикрутить инверсную кинематику я вообще не представляю.
Вообще хотел бы собрать манипулятор как на видео, он помощнее, но сервы сука дорогие.
На самом деле не совсем удачная штука, я думаю, что где-то обосрался, потому что серва еле ворочает этим манипулятором. Может быть слишком слабая серва, или я собрал неправильно. Плюс я спалил одну. А как прикрутить инверсную кинематику я вообще не представляю.
Вообще хотел бы собрать манипулятор как на видео, он помощнее, но сервы сука дорогие.
>>331261
Я-то питон давно знаю.
Питон правда простой, но для новичка всё равно не так прост.
Там можно учиться по официальным докам, можно по туториалу вроде этого http://pythontutor.ru/
Когда достаточно научишься можешь попровать сделать игру типа "мартышка собирает бананы"
Я-то питон давно знаю.
Питон правда простой, но для новичка всё равно не так прост.
Там можно учиться по официальным докам, можно по туториалу вроде этого http://pythontutor.ru/
Когда достаточно научишься можешь попровать сделать игру типа "мартышка собирает бананы"
>>332453
>А как прикрутить инверсную кинематику я вообще не представляю.
Могу помочь с этим. У тебя от ардуины управление? Можно впринципе ИК считать прямо на ардуине, можно на ПК.
У тебя она должна будет по желаемым координатам конца манипулятора выдавать значения углов для серв.
>Вообще хотел бы собрать манипулятор как на видео, он помощнее, но сервы сука дорогие.
А то!
Ну я бы делал на двух MG939 и на одной HXT900. У меня 3д-принтера просто нету.
>А как прикрутить инверсную кинематику я вообще не представляю.
Могу помочь с этим. У тебя от ардуины управление? Можно впринципе ИК считать прямо на ардуине, можно на ПК.
У тебя она должна будет по желаемым координатам конца манипулятора выдавать значения углов для серв.
>Вообще хотел бы собрать манипулятор как на видео, он помощнее, но сервы сука дорогие.
А то!
Ну я бы делал на двух MG939 и на одной HXT900. У меня 3д-принтера просто нету.
>>332561
Постой, но зачем ты тогда собрался изучать питон, если давно его знаешь?
Постой, но зачем ты тогда собрался изучать питон, если давно его знаешь?
>>332605
Я и не собрался, я просто тебе туториал давно нагуглил.
Я и не собрался, я просто тебе туториал давно нагуглил.
>>332603
>У меня 3д-принтера просто нету
Зато у тебя мозги есть, можешь порадоваться за себя. Управление да, от ардуины планирую сделать. Только перед ИК надо сделать чтобы это хоть как-то работало.
>У меня 3д-принтера просто нету
Зато у тебя мозги есть, можешь порадоваться за себя. Управление да, от ардуины планирую сделать. Только перед ИК надо сделать чтобы это хоть как-то работало.
>>332627
Ну сделай чтобы оно числа по последовательному порту на ардуино принимало и выводило их углами серв. Ты представляешь хоть как сервы работают, что там 50 герц и соответствие между шириной импульса и углом?
Ну сделай чтобы оно числа по последовательному порту на ардуино принимало и выводило их углами серв. Ты представляешь хоть как сервы работают, что там 50 герц и соответствие между шириной импульса и углом?
ВНИМАНИЕ ОХУЕННАЯ ИДЕЯ
Можно сделать из ардуино мастурбатор, но не простой, а с большим количеством сервоприводов, чтобы разнообразие движений было сравнимо с рукой, прилепить к нему датчик пульса как показатель удовольствия и путём обучения с подкреплением подобрать алгоритм, максимизирующий его?
Можно сделать из ардуино мастурбатор, но не простой, а с большим количеством сервоприводов, чтобы разнообразие движений было сравнимо с рукой, прилепить к нему датчик пульса как показатель удовольствия и путём обучения с подкреплением подобрать алгоритм, максимизирующий его?
>>332838
>прилепить к нему датчик пульса как показатель удовольствия
лол он тебя до сердечного приступа доведёт
Ну впринципе такое сделать можно, но результат может получиться невпечатляющим и данных много потребуется, тоесть времени.
MILKING MACHINE
>прилепить к нему датчик пульса как показатель удовольствия
лол он тебя до сердечного приступа доведёт
Ну впринципе такое сделать можно, но результат может получиться невпечатляющим и данных много потребуется, тоесть времени.
MILKING MACHINE
>>332954
Ну вот показатель удовольствия можно ещё какой-нибудь придумать. А от проблемы с данными для обучения никуда не деться, это да.
Ну вот показатель удовольствия можно ещё какой-нибудь придумать. А от проблемы с данными для обучения никуда не деться, это да.
>>332659
Бля, не получается сделать чтобы эта хуень работала, серве не хватает сил, говно какое-то.
Бля, не получается сделать чтобы эта хуень работала, серве не хватает сил, говно какое-то.
>>333376
Я разобрался. Этой хуитке питания не хватало. Ну и болты ослабил.
Я разобрался. Этой хуитке питания не хватало. Ну и болты ослабил.

>>331261
Давай, как кооперироваться будем?
Давай, как кооперироваться будем?
>>332838
Вот, это другое дело, это уже ближе к бордам, а то роботян, роботян.
Вот, это другое дело, это уже ближе к бордам, а то роботян, роботян.

>>329556
бампну просьбу
> Алсо, кто - нибудь доставит каналов, о программирование, нейронных сетях, машинном обучение и т.д.мне как всегда, как для мудаков и даунов
В гугл я умею, но мало ли.
бампну просьбу
> Алсо, кто - нибудь доставит каналов, о программирование, нейронных сетях, машинном обучение и т.д.мне как всегда, как для мудаков и даунов
В гугл я умею, но мало ли.
>>333435
Да, с питанием будь внимателен. Пиковое потребление даже мелких серв может быть 500ма - 1а.
Тут делают хороший БП и большой электролитичский конденсатор-бoмбу, чтобы проглатывал пиковые нагрузки.
Да, с питанием будь внимателен. Пиковое потребление даже мелких серв может быть 500ма - 1а.
Тут делают хороший БП и большой электролитичский конденсатор-бoмбу, чтобы проглатывал пиковые нагрузки.
>>333464
Тебе на английском или русском? Если не знаешь английского то мог бы его сначала поучить.
Тебе на английском или русском? Если не знаешь английского то мог бы его сначала поучить.
>>333478
Учу, на доулинго, есть приличные успехи, уже рандомные уже могу понимать рандомные предложения. Но книги, лучше на русском, пока что. Я понимаю, что английский нужен и важен.
Учу, на доулинго, есть приличные успехи, уже рандомные уже могу понимать рандомные предложения. Но книги, лучше на русском, пока что. Я понимаю, что английский нужен и важен.
>>333524
Да не знаю годных на русском, гугли сам. А на английском только по ML видел годное Google ML Course, что-то такое.
Ищи, анон!
Да не знаю годных на русском, гугли сам. А на английском только по ML видел годное Google ML Course, что-то такое.
Ищи, анон!
>>333524
Английский необходим. Все интересные материалы написаны на английском. Русскоязычные статьи чаще всего являют собой перевод или пересказ.
Английский необходим. Все интересные материалы написаны на английском. Русскоязычные статьи чаще всего являют собой перевод или пересказ.
От пекашного БП вообще без проблем все крутится. ЕЕЕЕЕЕЕЕЕЕЕЕЕЕЕ
>>335233
А ты брал готовую библиотеку для сервопривода или сам всё писал?
А ты брал готовую библиотеку для сервопривода или сам всё писал?
>>335597
Да, взял готовую. Да и скетч я спиздил, просто немного подредактировал стандартный пример, потому что не шарю почти.
Да, взял готовую. Да и скетч я спиздил, просто немного подредактировал стандартный пример, потому что не шарю почти.
>>335632
Советую почитать про управление твоим сервоприводом и попытаться генерировать сигнал самому. Это несложно.
Советую почитать про управление твоим сервоприводом и попытаться генерировать сигнал самому. Это несложно.

Вот набросок речевой системы. Это может быть основной частью ИИ, вокруг которой можно лепить всё остальное. Появление разума у человека тоже связано с развитием речи. Нужно будет добавить к обработке слов обработку данных от системы распознавания образов и датчиков тела. Соответственно, кроме слов можно выдавать также и механические команды.
>>335233
Отлично ! А как там с инверсной кинематикой, откалибровал хоть? Чтобы система координат какая-то была, и относительно неё всё с точностью до миллиметра работало.
Отлично ! А как там с инверсной кинематикой, откалибровал хоть? Чтобы система координат какая-то была, и относительно неё всё с точностью до миллиметра работало.

>>336194
У меня ардуина почему-то как-то странно считывает с серийного порта, хз.
>с точностью до миллиметра
XdXDXDDDDDD EBIN
Там люфт пиздец большой, про миллиметры и речи не может быть.
У меня ардуина почему-то как-то странно считывает с серийного порта, хз.
>с точностью до миллиметра
XdXDXDDDDDD EBIN
Там люфт пиздец большой, про миллиметры и речи не может быть.
>>336257
>У меня ардуина почему-то как-то странно считывает с серийного порта, хз.
Настрой скорость твоего терминала и последовательног порта ардуины, чтобы совпадало. Какой терминал используешь?
>У меня ардуина почему-то как-то странно считывает с серийного порта, хз.
Настрой скорость твоего терминала и последовательног порта ардуины, чтобы совпадало. Какой терминал используешь?

>>336381
Все вроде настроено, использую пример с сайта, отправляю ардуине единицу, она возвращает 49, отправляю двойку возвращает 50, и так далее.
Все вроде настроено, использую пример с сайта, отправляю ардуине единицу, она возвращает 49, отправляю двойку возвращает 50, и так далее.
>>336431
Попробуй другим терминалом, например Putty, там настройки разные есть
Попробуй другим терминалом, например Putty, там настройки разные есть

>>336505
Такая же херня.
Такая же херня.

>>336515
Ты путаешь приём байта и чтение числа.
"1" это уже 1 байт, причём он равен 49 в ASCII-кодировке.
Тебе надо вот так http://www.instructables.com/answers/How-to-input-NUMBERS-through-Arduino-serialmonito/ через ParseInt
Ты путаешь приём байта и чтение числа.
"1" это уже 1 байт, причём он равен 49 в ASCII-кодировке.
Тебе надо вот так http://www.instructables.com/answers/How-to-input-NUMBERS-through-Arduino-serialmonito/ через ParseInt

>>336553
еееееее, я написал программу, теперь рука поворачивает на заданный угол.
еееееее, я написал программу, теперь рука поворачивает на заданный угол.
Как на все три оси это запилить я пока не придумал.
>>336845
Отлично! Только там по-хорошему надо писать через https://www.arduino.cc/en/Reference/ServoWriteMicroseconds и откалибровать коэффициент чтобы точно преобразовывал угол в микросекунды управляющего сигнала.
Отлично! Только там по-хорошему надо писать через https://www.arduino.cc/en/Reference/ServoWriteMicroseconds и откалибровать коэффициент чтобы точно преобразовывал угол в микросекунды управляющего сигнала.
>>337129
Потому что у тебя много сдвигов в механике и сервах, их надо компенсировать линейно - k*x + b. k и b тебе надо посчитать так чтобы угол 0 поворачивал серву в 0 твоей системы координат
Потому что у тебя много сдвигов в механике и сервах, их надо компенсировать линейно - k*x + b. k и b тебе надо посчитать так чтобы угол 0 поворачивал серву в 0 твоей системы координат
>>337489
b ищешь настраивая серву на ноль (т.е. b это то что надо отправить на серву чтобы она была в положении 0)
k высчитываешь по разности чисел крутящих серву на 90 градусов и делению этого числа на 90 (если хочешь в градусах) или на pi/2 (если хочешь в радианах).
потом чтобы получить команду на серву из угла просто умножаешь его на свой коэффициент k и добавляешь b
b ищешь настраивая серву на ноль (т.е. b это то что надо отправить на серву чтобы она была в положении 0)
k высчитываешь по разности чисел крутящих серву на 90 градусов и делению этого числа на 90 (если хочешь в градусах) или на pi/2 (если хочешь в радианах).
потом чтобы получить команду на серву из угла просто умножаешь его на свой коэффициент k и добавляешь b
>>337691
>чисел крутящих серву на 90 градусов и делению этого числа на 90
Непонятно. Крайние положения у меня получаются на 900 и 2400, что дальше?
>чисел крутящих серву на 90 градусов и делению этого числа на 90
Непонятно. Крайние положения у меня получаются на 900 и 2400, что дальше?
>>337791
Посчитай коэффициенты чтобы вводить не 900 и 2400, а 0 и 90.
Посчитай коэффициенты чтобы вводить не 900 и 2400, а 0 и 90.
>>337946
Между 900 и 2400 лежит промежуток в 1500. Допустим 900 это 0, 2400 это 180.
К примеру чтобы повернуть на 30 градусов ты должен передать значение
900 + 30 × (1500/180)
Смекаешь?
Между 900 и 2400 лежит промежуток в 1500. Допустим 900 это 0, 2400 это 180.
К примеру чтобы повернуть на 30 градусов ты должен передать значение
900 + 30 × (1500/180)
Смекаешь?

>>337946
Сигнал для сервы = (угол - миниммальный угол) * (максимальный сигнал для сервы - минимальный сигнал для сервы) / (максимальный угол - минимальный угол) + минимальный сигнал для сервы
Подставим твои значения:
С. = (У. - 0) * (2400 - 900) / (180 - 0) + 900 = 25/3 * У. + 900
По этой формуле ты преобразовываешь угол в длительность импульса для сервы. Так ты сможешь управлять устройством, задавая конкретный угол поворота, что гораздо удобнее, чем задавать непонятные цифры.
Сигнал для сервы = (угол - миниммальный угол) * (максимальный сигнал для сервы - минимальный сигнал для сервы) / (максимальный угол - минимальный угол) + минимальный сигнал для сервы
Подставим твои значения:
С. = (У. - 0) * (2400 - 900) / (180 - 0) + 900 = 25/3 * У. + 900
По этой формуле ты преобразовываешь угол в длительность импульса для сервы. Так ты сможешь управлять устройством, задавая конкретный угол поворота, что гораздо удобнее, чем задавать непонятные цифры.
>>338030
Мне по сути для управления сервой надо обратное действие совершить, то есть из градусов сделать микросекунды.
Мне по сути для управления сервой надо обратное действие совершить, то есть из градусов сделать микросекунды.

>>338201
Ну вроде как-то так.
Ну вроде как-то так.

А теперь сервам по очереди задается значение.
>>338209
Тред не топи, я пока написать не могу, времени нет, если никто не напишет как тебе делать, то завтра днем чиркну.
Если коротко, то у тебя есть некоторый промежуток старта привода и его окончание работы, то есть до микросекунды имхо ты не скалибруешь, но вот до сотни микросекунд уже реально.
Тред не топи, я пока написать не могу, времени нет, если никто не напишет как тебе делать, то завтра днем чиркну.
Если коротко, то у тебя есть некоторый промежуток старта привода и его окончание работы, то есть до микросекунды имхо ты не скалибруешь, но вот до сотни микросекунд уже реально.
>>338641
Да у меня вроде уже что-то как-то работает. А тред долго не утонет, доска довольно медленная.
Да у меня вроде уже что-то как-то работает. А тред долго не утонет, доска довольно медленная.
>>338641
Ты вроде что-то не то имеешь в виду. Сервы управляются импульсами переменной ширины которые подаются на вход 50 раз в секунду, ширина импульса в микросекундах соответствует углу на который мы хотим повернуть серву.
http://robocraft.ru/blog/mechanics/240.html
Ты вроде что-то не то имеешь в виду. Сервы управляются импульсами переменной ширины которые подаются на вход 50 раз в секунду, ширина импульса в микросекундах соответствует углу на который мы хотим повернуть серву.
http://robocraft.ru/blog/mechanics/240.html
Bump
Бамп. Этот тред не должен тонуть.
,fvg
>>335984
Нормально выглядит, правда вопрос в том как устроены блоки которые решают какому обработчику текста (фиксированному или нейросетевому) текст передавать, и блоки которые его потом комбинируют.
Нормально выглядит, правда вопрос в том как устроены блоки которые решают какому обработчику текста (фиксированному или нейросетевому) текст передавать, и блоки которые его потом комбинируют.
>>342068
Навскидку два варианта.
1. Нечто вроде фильтров, через которые последовательно проходит поток текста.
2. Текст разбит на куски, каждый из которых проверяется на соответствие шаблонам. Если не соответствует, то отправляется "нейросети".
Навскидку два варианта.
1. Нечто вроде фильтров, через которые последовательно проходит поток текста.
2. Текст разбит на куски, каждый из которых проверяется на соответствие шаблонам. Если не соответствует, то отправляется "нейросети".
>>342097
Где бы нам примеров добыть как люди будут взаимодействовать с такими машинами.
Где бы нам примеров добыть как люди будут взаимодействовать с такими машинами.
>>342129
Когда тебе лень что-то делать, то берешь и записываешь на диктофон команды рободевочке, вот и примеры.
Когда тебе лень что-то делать, то берешь и записываешь на диктофон команды рободевочке, вот и примеры.
>>342176
Ну самим думать. Сделать пробную текстовую версию алгоритма на js, дать потестить анону или ещё кому.
Ну самим думать. Сделать пробную текстовую версию алгоритма на js, дать потестить анону или ещё кому.
Вот ещё вполне решаемая задача.
Найти программы для распознавания и синтеза речи. Синтезироваться должен приятный женский голос, желательно русский. Надо их скачать, собрать и настроить. По результатам собрать пакеты, удобно работающие "из коробки" или написать подробную инструкцию по настройке.
Найти программы для распознавания и синтеза речи. Синтезироваться должен приятный женский голос, желательно русский. Надо их скачать, собрать и настроить. По результатам собрать пакеты, удобно работающие "из коробки" или написать подробную инструкцию по настройке.
>>342209
Слушай, а какой-нибудь orange pi хватит для распознавания и синтеза голоса?
Слушай, а какой-нибудь orange pi хватит для распознавания и синтеза голоса?
>>342245
Там же ещё другие задачи крутить. Раздел подкачки на флеше в некоторой степени скомпенсирует недостаток памяти.
Там же ещё другие задачи крутить. Раздел подкачки на флеше в некоторой степени скомпенсирует недостаток памяти.
>>342266
>>342245
> раздел подкачки
И zram https://m.habrahabr.ru/post/172137/
https://wiki.gentoo.org/wiki/Zram
Можешь просто инструкцию с хабра в автозагрузку добавить
>>342245
> раздел подкачки
И zram https://m.habrahabr.ru/post/172137/
https://wiki.gentoo.org/wiki/Zram
Можешь просто инструкцию с хабра в автозагрузку добавить
>>342490
Так и планируется, только основную машину и реалтаймовую пока планируется пихнуть в корпус тянки.
Так и планируется, только основную машину и реалтаймовую пока планируется пихнуть в корпус тянки.
>>342635
Продолжаю охуевать с треда, думал вы тут кукол японских ебете, зашел вчера шуткануть, ананихуясебе, тут робота пилят в самом деле
Продолжаю охуевать с треда, думал вы тут кукол японских ебете, зашел вчера шуткануть, ананихуясебе, тут робота пилят в самом деле
>>342800
Ну а хули ты думал, лучшие умы БРчана тут шутки собрались шутить?
Ну а хули ты думал, лучшие умы БРчана тут шутки собрались шутить?
Робототехники, какие книжки читать, чтобы строить роботов? Посоветуйте пожалуйста.
>>343341
Исскуство схемотехники - Хилл, Хоровиц. Учебник по Си от Ритчи. Современные системы управления - Дорф.
Это теоретическая база. А дальше надо гуглить конкретные вопросы.
Исскуство схемотехники - Хилл, Хоровиц. Учебник по Си от Ритчи. Современные системы управления - Дорф.
Это теоретическая база. А дальше надо гуглить конкретные вопросы.
>>342800
К старости будем ебать самодельных киберняш. Главное, чтобы хуй стоял.
К старости будем ебать самодельных киберняш. Главное, чтобы хуй стоял.
>>343758
В 45 году изобретут наномашины, там уже можно будет омолодиться и хуй +33 см приделать.
В 45 году изобретут наномашины, там уже можно будет омолодиться и хуй +33 см приделать.
>>343341
Вот на английском книга неплохая http://www.maerivoet.org/website/software/arduino/manuals/electronics/robot-builders-bonanza.pdf
На русском по общей электронике неплохая книга для начинающих "Юный Радиолюбитель" https://yadi.sk/d/FCzaNSHmqgmUz и сайты вроде http://radiokot.ru/start/ http://robocraft.ru/page/summary/
Вот на английском книга неплохая http://www.maerivoet.org/website/software/arduino/manuals/electronics/robot-builders-bonanza.pdf
На русском по общей электронике неплохая книга для начинающих "Юный Радиолюбитель" https://yadi.sk/d/FCzaNSHmqgmUz и сайты вроде http://radiokot.ru/start/ http://robocraft.ru/page/summary/
>>343810
Написано простым языком, тематика интересная. Можно и с ардуины начинать, но это как-то не солидно.
Написано простым языком, тематика интересная. Можно и с ардуины начинать, но это как-то не солидно.
>>343810
Ну я не то чтобы совсем нубас, так что думаю, можно обмазаться, тем более как-то уже пытался.
Ну я не то чтобы совсем нубас, так что думаю, можно обмазаться, тем более как-то уже пытался.



Спа котана, я с очерендным отчетом:
Сделал ещё десяток игр в скратч
Освоил циклы, черепашью графику, научил улиточку ползать оставляя за собой "Привет, я морская улиточка, а ехидный сыр смеяться и летать на жаре из букана.
Мелочи по сути, но теперь просыпаясь, у меня есть цель, увы, стал меньше сидеть на броче. Есть что - то охуительное, когда видишь, как твоя улиточка начинает ползать, а какое же ощущение, когда начинает двигаться робовайфу? Аллах, это наверняка лучшее, что может быть в мире.
В целом, главы скратча, уже близки к завершению, остаются мелочи и перехожу на пайтон и сишку. Наверное, буду заёбывать вас вопросами.
Рад видеть, что вы так же наплаву и охуел, от того, что вы уже начинаете что - то делать.
Наверняка, тоже запасусь ардуиной.
Такие дела.
Вверх, самому годному треду.
Сделал ещё десяток игр в скратч
Освоил циклы, черепашью графику, научил улиточку ползать оставляя за собой "Привет, я морская улиточка, а ехидный сыр смеяться и летать на жаре из букана.
Мелочи по сути, но теперь просыпаясь, у меня есть цель, увы, стал меньше сидеть на броче. Есть что - то охуительное, когда видишь, как твоя улиточка начинает ползать, а какое же ощущение, когда начинает двигаться робовайфу? Аллах, это наверняка лучшее, что может быть в мире.
В целом, главы скратча, уже близки к завершению, остаются мелочи и перехожу на пайтон и сишку. Наверное, буду заёбывать вас вопросами.
Рад видеть, что вы так же наплаву и охуел, от того, что вы уже начинаете что - то делать.
Наверняка, тоже запасусь ардуиной.
Такие дела.
Вверх, самому годному треду.
>>346400
Если перейдёшь на С, то покупай сразу плату с STM вместо ардуины.
Если перейдёшь на С, то покупай сразу плату с STM вместо ардуины.

>>346409
Руки чешутся добраться до неё, особенно после того, как увидел, что можно сделать из ардуины. Уже нашёл уроки на эту плату, а чем она лучше/хуже ардуины?
.
Руки чешутся добраться до неё, особенно после того, как увидел, что можно сделать из ардуины. Уже нашёл уроки на эту плату, а чем она лучше/хуже ардуины?
.
>>346423
Мощнее процессор, больше ножек, больше возможностей по обработке сигналов. Сразу есть акселерометры, микрофон, выход для наушников. Заводится FreeRTOS. Это я про STM32F4Discovery.
Мощнее процессор, больше ножек, больше возможностей по обработке сигналов. Сразу есть акселерометры, микрофон, выход для наушников. Заводится FreeRTOS. Это я про STM32F4Discovery.
>>346409
Да необязательно это, ардуины для многого хватает. А STM32 можно программировать с той же библиотекой что работает в ардуино.
Я и то и то программировал.
Да необязательно это, ардуины для многого хватает. А STM32 можно программировать с той же библиотекой что работает в ардуино.
Я и то и то программировал.
>>346423
Начинай с ардуины и не парься, на алиэкспресс за 150-200 рублей купить можно. Купи пару штук. И не забудь breadboard, светодиоды, кнопочки, резисторы 200 ом и 2ком, можно ещё пару моторчиков с колёсами и l293d и ультразвуковой датчик
Начинай с ардуины и не парься, на алиэкспресс за 150-200 рублей купить можно. Купи пару штук. И не забудь breadboard, светодиоды, кнопочки, резисторы 200 ом и 2ком, можно ещё пару моторчиков с колёсами и l293d и ультразвуковой датчик
>>346612
Проводки не забудь. Dupont wires называется. Лучше сразу всех трёх типов (male-female/m-m/f-f) сантиметров по 20.
Ещё моторная плата нужная штука для мелких самодвижущихся повозок на DC-моторчиках.
Проводки не забудь. Dupont wires называется. Лучше сразу всех трёх типов (male-female/m-m/f-f) сантиметров по 20.
Ещё моторная плата нужная штука для мелких самодвижущихся повозок на DC-моторчиках.
>>346758
Да, проводки тоже обязательно.
Можешь смотреть что в такие наборы кладут https://www.aliexpress.com/af/arduino-starter-kit.html?site=glo&SearchText=arduino+starter+kit&SortType=total_tranpro_desc&groupsort=1&initiative_id=RS_20161103043842&isAffiliate=y&filterCat=400103,523,4002 и покупать это
Да, проводки тоже обязательно.
Можешь смотреть что в такие наборы кладут https://www.aliexpress.com/af/arduino-starter-kit.html?site=glo&SearchText=arduino+starter+kit&SortType=total_tranpro_desc&groupsort=1&initiative_id=RS_20161103043842&isAffiliate=y&filterCat=400103,523,4002 и покупать это
>>346400
Молодца! Когда начнёшь питон или си можешь меня спрашивать. Кстати JS может даже лучше питона, более прибыльный навык и стартануть проще потому что браузер есть у всех.
Молодца! Когда начнёшь питон или си можешь меня спрашивать. Кстати JS может даже лучше питона, более прибыльный навык и стартануть проще потому что браузер есть у всех.
>>346758
Постоянно у них кончики отрывались, у этих проводков. Удобнее взять обычный провод из одной жилы и отрезать куски от него.
Постоянно у них кончики отрывались, у этих проводков. Удобнее взять обычный провод из одной жилы и отрезать куски от него.
Собрал русские голоса для MaryTTS. Для первого некоторыми костылями и наложением эффектов удаётся достичь неплохого качества. Без костылей и фильтров звучит отвратно.
Второй пока не пробовал.
Второй пока не пробовал.
>>347713
Всё у них нормально с кончиками. По крайней мере с теми, что у меня.
Как ты будешь модули с male-разъёмами подключать, коих почти все? Паять?
Всё у них нормально с кончиками. По крайней мере с теми, что у меня.
Как ты будешь модули с male-разъёмами подключать, коих почти все? Паять?
бамп




>>351419
шакал ебучий ежжи
шакал ебучий ежжи

Ньюфаги не знают, олдфаги не помнят.
ТЯН ПО НОЧАМ ПАЯЛ!!11
ЕДРО СОБИРАЛ, МОЗГИ Я ЕБАЛ!!111
ТЯН СОЗДАВАЛ!!111
СЕКС, ЕБЛЯ, ТРАХ, МАСТУРБАЦИЯ!!!11
РАСПОЗНАВАНИЕ ЛИЦА, ЧЕРЕПА ТРЕПАНАЦИЯ!!11
РЕЗИНОВЫЕ СИСЬКИ!!11
ЭЛЕКТРОННЫЕ КИШКИ!!111
АВТОМАТИЗАЦИЯ!!111
ТЫСЯЧУ И ОДНУ НОЧЬ НА БРЕЙНФАКЕ!!111
ПИСАЛ ПРОШИВКУ Я КАТЕ!!11
СЕГФАЛТ, РЕБУТ, РЕЧЕЙ ГЕНЕРАЦИЯ!!!11
ПОЗОРНЫЕ ЗВУК, ГОЛОВЫ ДЕЗИНТЕГРАЦИЯ!!11
АРГГРААХХХАХАХАХАГАГАГ!!!!!!111
СЕКС, ЕБЛЯ, ТРАХ, МАСТУРБАЦИЯ!!111
РАСПОЗНАВАНИЕ ЛИЦА, ЧЕРЕПА ТРЕПАНАЦИЯ!!111
РЕЗИНОВЫЕ СИСЬКИ!!!111
ЭЛЕКТРОННЫЕ КИШКИ!!11
АВТОМАТИЗАЦИЯ!!111
ШАРНИРЫ ИЗ СТАЛИ!!11111
НАЛЕВО-НАПРАВО ВРАЩАЛИ!!111
ЗАПЧАСТИ ВСТАВЛЯЛИ!111
ЖИЗНЬ НАПОЛНЯЛИ!!!11
СЕКС, ЕБЛЯ, ТРАХ, МАСТУРБАЦИЯ!!11
РАСПОЗНАВАНИЕ ЛИЦА, ЧЕРЕПА ТРЕПАНАЦИЯ!!11
РЕЗИНОВЫЕ СИСЬКИ!11
ЭЛЕКТРОННЫЕ КИШКИ!!11
АВТОМАТИЗАЦИЯ!!!111
ТЯН ПО НОЧАМ ПАЯЛ!!11
ЕДРО СОБИРАЛ, МОЗГИ Я ЕБАЛ!!111
ТЯН СОЗДАВАЛ!!111
СЕКС, ЕБЛЯ, ТРАХ, МАСТУРБАЦИЯ!!!11
РАСПОЗНАВАНИЕ ЛИЦА, ЧЕРЕПА ТРЕПАНАЦИЯ!!11
РЕЗИНОВЫЕ СИСЬКИ!!11
ЭЛЕКТРОННЫЕ КИШКИ!!111
АВТОМАТИЗАЦИЯ!!111
ТЫСЯЧУ И ОДНУ НОЧЬ НА БРЕЙНФАКЕ!!111
ПИСАЛ ПРОШИВКУ Я КАТЕ!!11
СЕГФАЛТ, РЕБУТ, РЕЧЕЙ ГЕНЕРАЦИЯ!!!11
ПОЗОРНЫЕ ЗВУК, ГОЛОВЫ ДЕЗИНТЕГРАЦИЯ!!11
АРГГРААХХХАХАХАХАГАГАГ!!!!!!111
СЕКС, ЕБЛЯ, ТРАХ, МАСТУРБАЦИЯ!!111
РАСПОЗНАВАНИЕ ЛИЦА, ЧЕРЕПА ТРЕПАНАЦИЯ!!111
РЕЗИНОВЫЕ СИСЬКИ!!!111
ЭЛЕКТРОННЫЕ КИШКИ!!11
АВТОМАТИЗАЦИЯ!!111
ШАРНИРЫ ИЗ СТАЛИ!!11111
НАЛЕВО-НАПРАВО ВРАЩАЛИ!!111
ЗАПЧАСТИ ВСТАВЛЯЛИ!111
ЖИЗНЬ НАПОЛНЯЛИ!!!11
СЕКС, ЕБЛЯ, ТРАХ, МАСТУРБАЦИЯ!!11
РАСПОЗНАВАНИЕ ЛИЦА, ЧЕРЕПА ТРЕПАНАЦИЯ!!11
РЕЗИНОВЫЕ СИСЬКИ!11
ЭЛЕКТРОННЫЕ КИШКИ!!11
АВТОМАТИЗАЦИЯ!!!111

>>352716
Что это?
Я, Томас Эдисон, обрашаюсь через интернет к компаниям DLR, KUKA ROBOTER, ROBOWATCH, FESTO, SIMAX SYSTEMTECHNIK с просьбой предоставить мне рабочее место в компании за зарплату простого рабочего на территории Евросоюза. Предлагаю в качестве моего профессионального капитала мои изобретения, разработки, алгоритмы искусственного интеллекта по темам: андроиды, компьютеры, навигационные системы, космос, семантические поисковые системы интернета (алгоритмы, включая алгоритмы поиска объекта по неполным контурам), компьютерные алгоритмы распознавания смысла речи (механизмы общего контекста, алгоритмы цели и вероятности, вычисление всех коэффициентов….), алгоритмы распознавания малоконтрастных объектов, закрытых частично другими объектами, разработки в автомобилестроении, криптографии, разработки по новым, экономически окупаемым топливам для транспорта. Достаточно универсален, чтоб выполнить нестандартное задание по самой различной интеллектуальной тематике. С 1977г я непрерывно трачу все свои силы, чтоб вырваться из России для создания своей изобретательской фирмы. Меня остановили агентурным химическим террором. Помогите мне вырваться из России на работу в Евросоюзе! Я 10-кратно оплачу все ваши расходы на меня + пожизненная лояльность сверх этого!
Что это?
Я, Томас Эдисон, обрашаюсь через интернет к компаниям DLR, KUKA ROBOTER, ROBOWATCH, FESTO, SIMAX SYSTEMTECHNIK с просьбой предоставить мне рабочее место в компании за зарплату простого рабочего на территории Евросоюза. Предлагаю в качестве моего профессионального капитала мои изобретения, разработки, алгоритмы искусственного интеллекта по темам: андроиды, компьютеры, навигационные системы, космос, семантические поисковые системы интернета (алгоритмы, включая алгоритмы поиска объекта по неполным контурам), компьютерные алгоритмы распознавания смысла речи (механизмы общего контекста, алгоритмы цели и вероятности, вычисление всех коэффициентов….), алгоритмы распознавания малоконтрастных объектов, закрытых частично другими объектами, разработки в автомобилестроении, криптографии, разработки по новым, экономически окупаемым топливам для транспорта. Достаточно универсален, чтоб выполнить нестандартное задание по самой различной интеллектуальной тематике. С 1977г я непрерывно трачу все свои силы, чтоб вырваться из России для создания своей изобретательской фирмы. Меня остановили агентурным химическим террором. Помогите мне вырваться из России на работу в Евросоюзе! Я 10-кратно оплачу все ваши расходы на меня + пожизненная лояльность сверх этого!
>>353160
По конечному результату в мировом рынке я, как де-факто чемпион мира по конструированию, искусственному интеллекту, изобретательству, технической физике, технической математике и транспортно-топливной химии, могу заменить 2 миллиарда среднестатистических работников планеты. Качество мозга уничтожает саму потребность в труде в достижении цели, вместо тупой бесконечной траты десятилетиями человеко-часов, денег на цель. Способность уничтожать труд (человеко-часы), роль денег — это суть разницы качества мозгов. В сверхсложных вопросах качество мозга невозможно заменить неограниченным количеством мозгов меньшего качества. Талант простыми, дешевыми средствами превосходит то, чего профессионалы достигают сложными, дорогостоящими средствами. Покупайте 2 миллиарда работников за зарплату одного рабочего просто наняв меня на сложный проект мирового масштаба!
По конечному результату в мировом рынке я, как де-факто чемпион мира по конструированию, искусственному интеллекту, изобретательству, технической физике, технической математике и транспортно-топливной химии, могу заменить 2 миллиарда среднестатистических работников планеты. Качество мозга уничтожает саму потребность в труде в достижении цели, вместо тупой бесконечной траты десятилетиями человеко-часов, денег на цель. Способность уничтожать труд (человеко-часы), роль денег — это суть разницы качества мозгов. В сверхсложных вопросах качество мозга невозможно заменить неограниченным количеством мозгов меньшего качества. Талант простыми, дешевыми средствами превосходит то, чего профессионалы достигают сложными, дорогостоящими средствами. Покупайте 2 миллиарда работников за зарплату одного рабочего просто наняв меня на сложный проект мирового масштаба!
>>353175
ГЛАВА 88: Гидроботы: 88)(статье 5раз вредили правящие кланы)
ГЛАВА 88: Гидроботы: 88)(статье 5раз вредили правящие кланы)
глаза

>>357522
Еще охуеннее было бы вмонтировать камеру в глаз и прикрутить OpenCV, чтобы глаза следили за объектом. Но для меня это непосильная задача.
Еще охуеннее было бы вмонтировать камеру в глаз и прикрутить OpenCV, чтобы глаза следили за объектом. Но для меня это непосильная задача.
Собрал и попробовал второй голос для MaryTSS. Он хуже, хоть и данных вроде как больше.
Если интересно, могу написать инструкцию для самых маленьких.
Если интересно, могу написать инструкцию для самых маленьких.
>>336431
Ты долбоёб. Ты чар пишешь в инт. Внезапно, аски нуля - 48.
Ты долбоёб. Ты чар пишешь в инт. Внезапно, аски нуля - 48.
Анон, а к GPIO распберриподобных плат можно подрубить композитный сигнал с камеры?

>>360292
Не утонешь!
Не утонешь!
>>362000
Не у меня. Я просто занят, мне приходится всё с нуля делать. А людям, что в этом треде,я крайне признателен. Утопическая мечта, встретится с вами irl, но это так, не по теме.
Не у меня. Я просто занят, мне приходится всё с нуля делать. А людям, что в этом треде,я крайне признателен. Утопическая мечта, встретится с вами irl, но это так, не по теме.
https://brchan.org/rus/res/362254.html
техножрецы, вас ждут на собрание
техножрецы, вас ждут на собрание
не тонем в луже вайпа
>>300764
Сохранил тред куклой. Думаю это можно автоматизировать с помощью wget,curl и cron. Залиливать будет на transfer т.к. не знаю других файлообменников на которые поддерживают curl.
https://transfer.sh/mU1oi/robots4214144.tar
Сохранил тред куклой. Думаю это можно автоматизировать с помощью wget,curl и cron. Залиливать будет на transfer т.к. не знаю других файлообменников на которые поддерживают curl.
https://transfer.sh/mU1oi/robots4214144.tar

>>358147
1. Установить программы.
Java.
Git.
Sox. http://sox.sourceforge.net/
Praat. http://www.fon.hum.uva.nl/praat/
Edinburgh Speech Tools. http://www.cstr.ed.ac.uk/projects/speech_tools/
Последняя устанавливается вместе с festival, так что можно установить сразу его.
2. Идём в консольку.
3. Скачиваем себе голос.
git clone https://github.com/cmusphinx/voice-ac-elena.git
4. Собираем. Собираться может долго, это нормально.
./gradlew legacyInit
./gradlew build
Тут у меня появилась ошибка. Вот эта команда при сборке её вызывает.
praat /home/user/voice-ac-irina/build/temp/script.praat /home/user/voice-ac-irina/build/basenames.lst /home/user/voice-ac-irina/build/wav/ /home/user/voice-ac-irina/build/pm/ 100 500
Её надо скопировать и запустить. Работает долго.
После этого заново пытаемся собрать командой ./gradlew build
5. Запускаем сервер MaryTTS.
./gradlew run
6. Идём в браузер, заходим на http://localhost:59125/
Откроется страничка с веб-клиентом нашего синтезатора речи. Доступен единственный голос.
Можно сделать его звучать несколько лучше. Для этого в списке эффектов надо отметить Chorus и в поле настройки рядом с ним написать
delay1:200;amp1:0.54;delay2:350;amp2:-0.10;delay3:100;amp3:0.30
Таким образом удаётся избавиться от прерывистого звучания.
TractScaler там же может сделать голос более низким или высоким.
При желании можно скопировать собранный голос в нормально установленную MaryTTS.
Аналогично собирается голос voice-ac-irina, но мне он не понравился.
1. Установить программы.
Java.
Git.
Sox. http://sox.sourceforge.net/
Praat. http://www.fon.hum.uva.nl/praat/
Edinburgh Speech Tools. http://www.cstr.ed.ac.uk/projects/speech_tools/
Последняя устанавливается вместе с festival, так что можно установить сразу его.
2. Идём в консольку.
3. Скачиваем себе голос.
git clone https://github.com/cmusphinx/voice-ac-elena.git
4. Собираем. Собираться может долго, это нормально.
./gradlew legacyInit
./gradlew build
Тут у меня появилась ошибка. Вот эта команда при сборке её вызывает.
praat /home/user/voice-ac-irina/build/temp/script.praat /home/user/voice-ac-irina/build/basenames.lst /home/user/voice-ac-irina/build/wav/ /home/user/voice-ac-irina/build/pm/ 100 500
Её надо скопировать и запустить. Работает долго.
После этого заново пытаемся собрать командой ./gradlew build
5. Запускаем сервер MaryTTS.
./gradlew run
6. Идём в браузер, заходим на http://localhost:59125/
Откроется страничка с веб-клиентом нашего синтезатора речи. Доступен единственный голос.
Можно сделать его звучать несколько лучше. Для этого в списке эффектов надо отметить Chorus и в поле настройки рядом с ним написать
delay1:200;amp1:0.54;delay2:350;amp2:-0.10;delay3:100;amp3:0.30
Таким образом удаётся избавиться от прерывистого звучания.
TractScaler там же может сделать голос более низким или высоким.
При желании можно скопировать собранный голос в нормально установленную MaryTTS.
Аналогично собирается голос voice-ac-irina, но мне он не понравился.
>>363117
Рыгхост
http://rgho.st/8M8s4zNVM
Алсо вспомнил https://megatools.megous.com/
Есть в оверлеях генты и на pkgs.org нашёл, но у меня в репах нет voidlinux. Cейчас наверное с live cd проверю можно ли ей пользоваться, но первая версия скрипта будет без этой штуки. Возможно просто у кого-нибудь другого похожий скриптик уже есть и можно спереть. Я просто нервничаю из-за вайпа тредов и боюсь, что он перейдёт в вайп доски, а мы утонем.
>>363243
Хорошо, что написал, спасибо. ~~ У меня бомбит от современных программ, которые нельзя без проблем собрать одним кроссплатформенным makefile. И сцуко они ещё web интерфейс пишут . ~~
Рыгхост
http://rgho.st/8M8s4zNVM
Алсо вспомнил https://megatools.megous.com/
Есть в оверлеях генты и на pkgs.org нашёл, но у меня в репах нет voidlinux. Cейчас наверное с live cd проверю можно ли ей пользоваться, но первая версия скрипта будет без этой штуки. Возможно просто у кого-нибудь другого похожий скриптик уже есть и можно спереть. Я просто нервничаю из-за вайпа тредов и боюсь, что он перейдёт в вайп доски, а мы утонем.
>>363243
Хорошо, что написал, спасибо. ~~ У меня бомбит от современных программ, которые нельзя без проблем собрать одним кроссплатформенным makefile. И сцуко они ещё web интерфейс пишут . ~~
>>363500
Ну это же жаба.
Вот клиент-серверная организация мне как раз понравилась. Сама суть TTS подразумевает использование её с другими программами, а с сервером это просто и удобно. Можно ещё и сервер на другой машине крутить при желании.
Ну это же жаба.
Вот клиент-серверная организация мне как раз понравилась. Сама суть TTS подразумевает использование её с другими программами, а с сервером это просто и удобно. Можно ещё и сервер на другой машине крутить при желании.
Сколько здесь всего живых анонов? Отзовитесь.

>>363632
саморазвиватель туто.
саморазвиватель туто.

бумп
>>363500
Cцуко и wget и httrack не могут нормально скачать тред. Скачивают только robots.txt и html страничку. Я конечно попытаюсь ещё, но лучше если кто-то скажет,как скачивалось в кукле.
Cцуко и wget и httrack не могут нормально скачать тред. Скачивают только robots.txt и html страничку. Я конечно попытаюсь ещё, но лучше если кто-то скажет,как скачивалось в кукле.
бумп
Поцоны, а на какой ОС будет работать ваша вайфа?
ЕЕЕЕЕЕЕЕЕЕЕЕЕЕЕЕЕЕ
Я таки прикрутил OpenCV. Код спиздил, целый день пердолился и прикрутил к глазам распознавание зеленого кружка. Вот довольно невнятная демонстрация.
Я таки прикрутил OpenCV. Код спиздил, целый день пердолился и прикрутил к глазам распознавание зеленого кружка. Вот довольно невнятная демонстрация.

>>371612
Linux и какая-нибудь ОС реального времени для механической части.
Linux и какая-нибудь ОС реального времени для механической части.
Бамп.

Не тонем.
>>381069
Куда писать, чтобы бесплатно прислали вайфу, не сказали, а заниматься крайне сложным делом с почти гарантированным отсутствием результата никто не будет.
Куда писать, чтобы бесплатно прислали вайфу, не сказали, а заниматься крайне сложным делом с почти гарантированным отсутствием результата никто не будет.

Я вот зенки заказал, чтобы прикинуть, как это может выглядеть.
>>381703
Удачи с глазками. А вообще, есть достаточно мелкие камеры с приемлемым качеством и ценой?
Удачи с глазками. А вообще, есть достаточно мелкие камеры с приемлемым качеством и ценой?
>>381728
https://ru.aliexpress.com/item/Ominivison-OV2710-2MP-1080P-wide-angle-180degree-fisheye-USB-camera-module-ELP-USBFHD01M-L180/32233903219.html
В принципе можно высверлить зрачок с обратной стороны и вставить туда что-то такое. Но на такую конструкцию как у меня это не встанет точно, надо будет что-то свое моделировать.
https://ru.aliexpress.com/item/Ominivison-OV2710-2MP-1080P-wide-angle-180degree-fisheye-USB-camera-module-ELP-USBFHD01M-L180/32233903219.html
В принципе можно высверлить зрачок с обратной стороны и вставить туда что-то такое. Но на такую конструкцию как у меня это не встанет точно, надо будет что-то свое моделировать.
Бамп.
Бамп.
Анон, как запилить пневматические мышцы?
>>386603
Нужна помпа, латексная трубка и кусок тканевой оплетки от провода.
Нужна помпа, латексная трубка и кусок тканевой оплетки от провода.
>>386603
Вот про леску. Если добавить электрический нагрев и эффективное охлаждение, то будет интересно.
http://www.instructables.com/id/DIY-artificial-muscle/
Вот про леску. Если добавить электрический нагрев и эффективное охлаждение, то будет интересно.
http://www.instructables.com/id/DIY-artificial-muscle/
>>387508
Но в научной публикации писали что КПД такой системы не превышает 5%
Но в научной публикации писали что КПД такой системы не превышает 5%
Тред почти не читал
Я школьник, 10 класс. Знаю алгебру 10-11 класса и физику 10 класса, занимаюсь ассемблером. Что ещё нужно знать ещё для создания робовайфу планирую химию 10-11 и физику 11, а дальше не знаю что? Планирую всё своё делать и ПО и детали
Я школьник, 10 класс. Знаю алгебру 10-11 класса и физику 10 класса, занимаюсь ассемблером. Что ещё нужно знать ещё для создания робовайфу планирую химию 10-11 и физику 11, а дальше не знаю что? Планирую всё своё делать и ПО и детали
Предположим сделал чертёж какой-нить НЁХ и куда мне его отправлять, чтобы сделали?
>>387715
Матан, теория управления, программирование, нейросети. Куча разных направлений.
Матан, теория управления, программирование, нейросети. Куча разных направлений.
>>387812
Мне хватит одного ассемблера? Как можно сделать мелкие детали ИРЛ?
Мне хватит одного ассемблера? Как можно сделать мелкие детали ИРЛ?
>>387869
Ассемблер почти не нужен. Мелкие детали только в заводских иди околозаводских условиях.
Ассемблер почти не нужен. Мелкие детали только в заводских иди околозаводских условиях.
>>387978
Разве на ассемблере не можно написать всё что нужно? Он же низкоуровневый, ниже только машинный код
Обращаться на прямую в завод или есть канторы, которые связываются с нужными заводами? Или намекни как искать подобное, пожалуйста
Разве на ассемблере не можно написать всё что нужно? Он же низкоуровневый, ниже только машинный код
Обращаться на прямую в завод или есть канторы, которые связываются с нужными заводами? Или намекни как искать подобное, пожалуйста
>>388013
>Разве на ассемблере не можно написать всё что нужно?
Теоретически можно. На деле - нет. Языки программирования придумали не просто так.
>намекни как искать подобное
Искать мастерские, спрашивать у знакомы, на тематических ресурсах в инете. Тонкую работу дома не сделаешь. Но об этом рано ещё говорить.
>Разве на ассемблере не можно написать всё что нужно?
Теоретически можно. На деле - нет. Языки программирования придумали не просто так.
>намекни как искать подобное
Искать мастерские, спрашивать у знакомы, на тематических ресурсах в инете. Тонкую работу дома не сделаешь. Но об этом рано ещё говорить.
>>387777
1.Гуглишь fablab имятвоеймухосрани.
2. Идёшь по найденному адресу.
3. Платишь за работу станка.
4. ???
5. PROFIT
1.Гуглишь fablab имятвоеймухосрани.
2. Идёшь по найденному адресу.
3. Платишь за работу станка.
4. ???
5. PROFIT
>>389350
Хотя на самом деле вероятность существования fablabа в мухосрани очень мала.
Хотя на самом деле вероятность существования fablabа в мухосрани очень мала.
>>388013
>Разве на ассемблере не можно написать всё что нужно? Он же низкоуровневый, ниже только машинный код
Конечно можно, и на машинном коде можно. На практике первая же программа которая будет написана это будет текстовый редактор, файловый менеджер и более удобный ассемблер, а потом и интерпретатор какого-то простого языка программирования типа лисп или форт, а потом уже с этими инструментами ты решишь любые задачи которые перед тобой встанут.
>Разве на ассемблере не можно написать всё что нужно? Он же низкоуровневый, ниже только машинный код
Конечно можно, и на машинном коде можно. На практике первая же программа которая будет написана это будет текстовый редактор, файловый менеджер и более удобный ассемблер, а потом и интерпретатор какого-то простого языка программирования типа лисп или форт, а потом уже с этими инструментами ты решишь любые задачи которые перед тобой встанут.

>>387715
>Планирую всё своё делать и ПО и детали
Это достойно уважения!
Я начинал с электроники, потом занялся микроконтроллерами и ассемблером, потом более высокоуровневыми языками и математикой.
> Что ещё нужно знать ещё для создания робовайфу
0) Математика - тригонометрия, прямая кинематика, многочлены, интерполяция. Немного численной математики вроде метода градиентного спуска, он помогает.
1) Базовая физика/механика. Третий закон ньютона, силы, моменты сил, центры масс, тензоры инерции. Умение рассчитать статический момент в суставах неподвижного манипулятора.
2) Программирование на языках высокого уровня, вроде С, Python, JavaScript. В идеале нужно уметь написать симуляцию простого физического события, например сталкивающихся шаров. Это будет знаком того что ты хорошо понимаешь физика. Для управление роботами применяется та же математика и подпрограммы что в таких симуляциях. Также нужно в достаточной мере понимать как работают ОС, вроде linux потому что роботы и почти все программисты их используют.
По Си хорошая книга - "Керниган и Ричи: Язык С". По JS - туториал learn.javascript.ru
3) Базовая электроника - напряжение и ток, зачем нужен общий провод, закон ома, резисторы, конденсаторы, индукторы, транзисторы (биполярные и MOSFET), электромоторы, мосты для управления электромоторами, ШИМ-модуляция для управления электромоторами. Цифровая электроника, логические уровни (диапазоны напряжения которые соответствуют 0 или 1). Хоббийные сервоприводы. Про эти вещи читать можно тут: http://radiokot.ru/start/ http://robocraft.ru/
4) Немного теории управления - PID-регулятор, обратный маятник, применение ПИД-регулятора для управления обратным маятником. Желательно симуляцию этого всего сделать, хоть на JS/HTML5 Canvas.
5) Компьютерное зрение и машинное обучение. Эти области довольно сложные, но на готовых рецептах по opencv и на готовых библиотеках машинного обучения можно далеко уехать. Но надо понимать что такое задача классификации в машинном обучении, что такое датасет, метки и модель. Об этом можно тут начать читать http://www.machinelearning.ru/wiki/index.php?title=%D0%9C%D0%B0%D1%88%D0%B8%D0%BD%D0%BD%D0%BE%D0%B5_%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5
Ещё надо английский знать.
Впринципе чтобы сделать простого робота всё это не нужно, но по мере развития всё это понадобится.
>Планирую всё своё делать и ПО и детали
Это достойно уважения!
Я начинал с электроники, потом занялся микроконтроллерами и ассемблером, потом более высокоуровневыми языками и математикой.
> Что ещё нужно знать ещё для создания робовайфу
0) Математика - тригонометрия, прямая кинематика, многочлены, интерполяция. Немного численной математики вроде метода градиентного спуска, он помогает.
1) Базовая физика/механика. Третий закон ньютона, силы, моменты сил, центры масс, тензоры инерции. Умение рассчитать статический момент в суставах неподвижного манипулятора.
2) Программирование на языках высокого уровня, вроде С, Python, JavaScript. В идеале нужно уметь написать симуляцию простого физического события, например сталкивающихся шаров. Это будет знаком того что ты хорошо понимаешь физика. Для управление роботами применяется та же математика и подпрограммы что в таких симуляциях. Также нужно в достаточной мере понимать как работают ОС, вроде linux потому что роботы и почти все программисты их используют.
По Си хорошая книга - "Керниган и Ричи: Язык С". По JS - туториал learn.javascript.ru
3) Базовая электроника - напряжение и ток, зачем нужен общий провод, закон ома, резисторы, конденсаторы, индукторы, транзисторы (биполярные и MOSFET), электромоторы, мосты для управления электромоторами, ШИМ-модуляция для управления электромоторами. Цифровая электроника, логические уровни (диапазоны напряжения которые соответствуют 0 или 1). Хоббийные сервоприводы. Про эти вещи читать можно тут: http://radiokot.ru/start/ http://robocraft.ru/
4) Немного теории управления - PID-регулятор, обратный маятник, применение ПИД-регулятора для управления обратным маятником. Желательно симуляцию этого всего сделать, хоть на JS/HTML5 Canvas.
5) Компьютерное зрение и машинное обучение. Эти области довольно сложные, но на готовых рецептах по opencv и на готовых библиотеках машинного обучения можно далеко уехать. Но надо понимать что такое задача классификации в машинном обучении, что такое датасет, метки и модель. Об этом можно тут начать читать http://www.machinelearning.ru/wiki/index.php?title=%D0%9C%D0%B0%D1%88%D0%B8%D0%BD%D0%BD%D0%BE%D0%B5_%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5
Ещё надо английский знать.
Впринципе чтобы сделать простого робота всё это не нужно, но по мере развития всё это понадобится.
I don't Understand a single word of Russian, but just by looking at this thread image I can answer you guys: yes! Science will create loli robotic dells, eventually.

Пытался сегодня слепить череп, получилась какая-то хуита.
,fvg
>>390770
Как мне кажется, надо брать модель человеческого черепа, от которой потом аккуратно отрезать лишнее.
Как мне кажется, надо брать модель человеческого черепа, от которой потом аккуратно отрезать лишнее.


>>390770
У нее место мозгов будет ардуино? Она же очень медленно будет соображать
У нее место мозгов будет ардуино? Она же очень медленно будет соображать
>>396059
Пропорции должны быть человеческими, иначе у тебя получится не вайфу, а очередная робоняня. На основу можно натянуть уже какой угодно дизайн.
Пропорции должны быть человеческими, иначе у тебя получится не вайфу, а очередная робоняня. На основу можно натянуть уже какой угодно дизайн.


>>397273
Какую захочу такую и сделаю, имитировать человека всё равно дорого и сложно. Мне больше нравятся игрушки.
Какую захочу такую и сделаю, имитировать человека всё равно дорого и сложно. Мне больше нравятся игрушки.
Браноны, как вы собираетесь делать своей тяночке интеллект хотя бы на уровне тупой блондинки?
бамп же

>>402241
Я тут схемку набросал, дополните чем-нибудь.
Я тут схемку набросал, дополните чем-нибудь.
>>402574
Ну че толсто-то? Я же еще разъем для флешлайта не нарисовал.
Ну че толсто-то? Я же еще разъем для флешлайта не нарисовал.
Немного не по теме, но
Есть у вас какая-нить литература по процессорам? Такая, чтобы и придраться было не к чему
Нужно про процессор: как работает (максимально детальное описание всего (регистры, стек, прочее)). А было бы не плохо, если бы дали ссылку на сайты, где можно найти подобную литературу, заранее благодарю
Есть у вас какая-нить литература по процессорам? Такая, чтобы и придраться было не к чему
Нужно про процессор: как работает (максимально детальное описание всего (регистры, стек, прочее)). А было бы не плохо, если бы дали ссылку на сайты, где можно найти подобную литературу, заранее благодарю
>>402238
А вот это очень правильное решение. Нельзя делать совсем антропоморных, они должны быть роботами. Зловещую долину никто не отменял.
А вот это очень правильное решение. Нельзя делать совсем антропоморных, они должны быть роботами. Зловещую долину никто не отменял.
>>403050
По-моему самый пиздец это обычно силиконовая кожа на лице. На голове можно ограничиться софт тач пластиком, а для остального тела использовать какой-нибудь силикон.
По-моему самый пиздец это обычно силиконовая кожа на лице. На голове можно ограничиться софт тач пластиком, а для остального тела использовать какой-нибудь силикон.

>>403077
Можно даже было глазные яблоки не покупать. Вообще было бы хорошо иметь концепт и плясать уже вокруг него. Просто действительно я бы тоже предпочел игрушку тем ужасным роботам с костями и силиконовой коже из ютуба.
мимо
> По-моему самый пиздец это обычно силиконовая кожа на лице.
Хочешь полностью из пластмассы корпус головы?
Можно даже было глазные яблоки не покупать. Вообще было бы хорошо иметь концепт и плясать уже вокруг него. Просто действительно я бы тоже предпочел игрушку тем ужасным роботам с костями и силиконовой коже из ютуба.
мимо
> По-моему самый пиздец это обычно силиконовая кожа на лице.
Хочешь полностью из пластмассы корпус головы?
>>403119
У нее еблет похож на ту тянку, которая "женюсь на этой няше в субботу", на подсознательном уровне вызывает отвращение.
У нее еблет похож на ту тянку, которая "женюсь на этой няше в субботу", на подсознательном уровне вызывает отвращение.

ОП, а тебе вообще зачем робот, пиво подносить или ебать его?
>>403319
Ну в идеале и то и другое, а вообще хуй знает, наверное для удовлетворения личных амбиций.
Ну в идеале и то и другое, а вообще хуй знает, наверное для удовлетворения личных амбиций.
>>403270
Ебать игрушку тоже не вариант. Чтобы роботы привлёк спонсоров надо создать у потребителя вау-фект.
Держи видео с роботами без долины
https://youtu.be/DF39Ygp53mQ
Этому видео 5 лет
Ебать игрушку тоже не вариант. Чтобы роботы привлёк спонсоров надо создать у потребителя вау-фект.
Держи видео с роботами без долины
https://youtu.be/DF39Ygp53mQ
Этому видео 5 лет
>>402586
Диванные аноны всегда хотят сразу красивое, продуктового вида, и чтобы стоило не дороже чем смартфон.
Диванные аноны всегда хотят сразу красивое, продуктового вида, и чтобы стоило не дороже чем смартфон.
>>402618
Да. Вот стандартный учебник для студентов computer architecture http://gen.lib.rus.ec/book/index.php?md5=CDCADBA35E61ED3D3BA66D168AFEC653 которые в будущем будут разрабатывать цифровую электронику, в том числе микропроцессоры.
Если же ты имел в виду просто программировать обычный x86-64 процессор то есть такие https://toster.ru/q/197637
>А было бы не плохо, если бы дали ссылку на сайты, где можно найти подобную литературу, заранее благодарю
http://gen.lib.rus.ec/
Да. Вот стандартный учебник для студентов computer architecture http://gen.lib.rus.ec/book/index.php?md5=CDCADBA35E61ED3D3BA66D168AFEC653 которые в будущем будут разрабатывать цифровую электронику, в том числе микропроцессоры.
Если же ты имел в виду просто программировать обычный x86-64 процессор то есть такие https://toster.ru/q/197637
>А было бы не плохо, если бы дали ссылку на сайты, где можно найти подобную литературу, заранее благодарю
http://gen.lib.rus.ec/
>>403169
Если можешь делать ололо-женщину то вперёд, делай. Будешь продавать скин для скелета который мы разрабатываем?
… а, я забыл что у тебя руки из попки и ты ничего сделать не можешь, анон. Ну извини тогда, пока.
Если можешь делать ололо-женщину то вперёд, делай. Будешь продавать скин для скелета который мы разрабатываем?
… а, я забыл что у тебя руки из попки и ты ничего сделать не можешь, анон. Ну извини тогда, пока.
>>403362
Разработка домашнего андройда это чисто-инженерная задача а не научная, учёным которые изучают сверхпроводимость в керамиках тут делать нечего. Для вас есть университеты.
Разработка домашнего андройда это чисто-инженерная задача а не научная, учёным которые изучают сверхпроводимость в керамиках тут делать нечего. Для вас есть университеты.
>>403319
Ты тупое безамбициозное чмо если не хочешь сделать личного робота который будет делать тебе работу по дому и составлять компанию.
То что ты заговорил о пиве уже говорит в пользу того что ты пивное чмо у которого в бутылку давно ушёл и тот слабый разум что был дан.
Ты тупое безамбициозное чмо если не хочешь сделать личного робота который будет делать тебе работу по дому и составлять компанию.
То что ты заговорил о пиве уже говорит в пользу того что ты пивное чмо у которого в бутылку давно ушёл и тот слабый разум что был дан.
>>404603
Сидят, но не надо путать две разные области человеческой деятельности - науку и инженерию. Только самые тупые обыватели относят это на одну полку, типа и то и то умное потому что, наверное.
Сидят, но не надо путать две разные области человеческой деятельности - науку и инженерию. Только самые тупые обыватели относят это на одну полку, типа и то и то умное потому что, наверное.
>>405152
В нашем случае они как раз и путаются. Насколько я знаю, нейросетей, с которыми можно лампово болтать под пледиком, ещё не придумали, а их разработка - больше научная, а не инженерная задача. К науке можно отнести искусственные мышцы, которых толком ещё не завезли, и плавное движение ходячего робота.
В нашем случае они как раз и путаются. Насколько я знаю, нейросетей, с которыми можно лампово болтать под пледиком, ещё не придумали, а их разработка - больше научная, а не инженерная задача. К науке можно отнести искусственные мышцы, которых толком ещё не завезли, и плавное движение ходячего робота.
>>405152
> самые тупые обыватели
> /rus/
Анон, ты слишком хорошего мнения обо мне. Неужели нельзя такому как мне инженера и его действа с роботами назвать наукой?
> самые тупые обыватели
> /rus/
Анон, ты слишком хорошего мнения обо мне. Неужели нельзя такому как мне инженера и его действа с роботами назвать наукой?
треду — бамп!
Бамп треду!

>>408687
Зато теперь ты знаешь, чем отличается инженер о учёного. И уже не самый тупой.
Зато теперь ты знаешь, чем отличается инженер о учёного. И уже не самый тупой.
>>405571
Надо реалистично мыслить, анон. Взрослые инженеры работающие на рынок и на большинство государственных проектов (кроме самых экстремальных вроде полётов на луну и ядерной отрасли) уже на стадии задачи отвергнут её если увидят что в ней есть научный компонент.
Если инженерная задача требует новой науки то она незрелая ещё, за такую задачу не берутся.
На примере нашего проекта должно быть понятно что робоприслугу надо собирать из тех технологий что уже существуют а не пытаться придумывать
>искусственные мышцы
>нейросетей, с которыми можно лампово болтать под пледиком, ещё не придумали
Потому что это сразу переносит проект в разряд безнадёжного, т.к. над этими вопросами западные учёные уже не одно десятилетие работают с миллиардными бюджетами.
Будь скромным, знай свои пределы, и тогда что-то получится.
Надо реалистично мыслить, анон. Взрослые инженеры работающие на рынок и на большинство государственных проектов (кроме самых экстремальных вроде полётов на луну и ядерной отрасли) уже на стадии задачи отвергнут её если увидят что в ней есть научный компонент.
Если инженерная задача требует новой науки то она незрелая ещё, за такую задачу не берутся.
На примере нашего проекта должно быть понятно что робоприслугу надо собирать из тех технологий что уже существуют а не пытаться придумывать
>искусственные мышцы
>нейросетей, с которыми можно лампово болтать под пледиком, ещё не придумали
Потому что это сразу переносит проект в разряд безнадёжного, т.к. над этими вопросами западные учёные уже не одно десятилетие работают с миллиардными бюджетами.
Будь скромным, знай свои пределы, и тогда что-то получится.
>>416024
Он другой смысл вкладывал. А Сири или Кортана это то что получится если делать сейчас, да, это реалистично (и неплохо).
Он другой смысл вкладывал. А Сири или Кортана это то что получится если делать сейчас, да, это реалистично (и неплохо).
Я видел в треде схемы. Давайте их дальше прорабатывать, конкретные библиотеки изучать.
Давайте изучать опыт разработки социальных роботов, их уже несколько штук на кикстартере профинансировали.
Давайте изучать опыт разработки социальных роботов, их уже несколько штук на кикстартере профинансировали.
>>418646
>Имеет смысл заняться и распознаванием речи.
Можно просто нужную часть выдрать http://openassistant.org/about/
https://github.com/vavrek/openassistant
>Имеет смысл заняться и распознаванием речи.
Можно просто нужную часть выдрать http://openassistant.org/about/
https://github.com/vavrek/openassistant
бамп
>>415856
>Будь скромным, знай свои пределы
Свои пределы я знаю, они заканчиваются задолго до роботов. Но мечтать же никто пока не запрещал.
>Будь скромным, знай свои пределы
Свои пределы я знаю, они заканчиваются задолго до роботов. Но мечтать же никто пока не запрещал.
Сейчас нет программ, которые могут вменяемо общаться, ждать лет 5-10 еще.
>>300764
Вангую, затрахаешься с модулем обработки видеоматериала с видеокамер.
А без этого она даже стопку портвешка поднять не сможет.
Вангую, затрахаешься с модулем обработки видеоматериала с видеокамер.
А без этого она даже стопку портвешка поднять не сможет.
>>425361
Полная ахинея, я пробовал. Выбирается наиболее подходящий ответ из базы. Для создания нормального собеседника понадобятся нейросети, у гугла какие-то подвижки есть, но понятно, что разработка такой технологии стоит очень дорого, и даже если они сделают то будут предоставлять только как платный сервис.
Полная ахинея, я пробовал. Выбирается наиболее подходящий ответ из базы. Для создания нормального собеседника понадобятся нейросети, у гугла какие-то подвижки есть, но понятно, что разработка такой технологии стоит очень дорого, и даже если они сделают то будут предоставлять только как платный сервис.
>>425361
>You said: can i use you to build robot maid?
>A.L.I.C.E.: Interesting. I want to find out more about you.
лул
>You said: can i use you to build robot maid?
>A.L.I.C.E.: Interesting. I want to find out more about you.
лул



