

>Я вообще не понимаю, как из этого можно извлечь угол...
Я не инженегр, но...
Возьмём одноходовый переменный резистор. Полный оборот у него почти 270 градусов. Выставим указатель на середину - это будет 135 градусов и замерим сопротивление. Отсюда минимальное положение будет равно 0 градусов, а максимальное 270 градусам.
У нас так плотность цементного расствора измеряется на тампонажных станциях: такие длинные штанги с вертлюгами, похижими на ковши лопат.
>Отсюда минимальное положение будет равно 0 градусов, а максимальное 270 градусам.
Да, забыл добавить: а дальше это просто делитель напряжения, который считается по закону Ома.
Вот как-то так должно быть.
>Инженигеры по ИК - бошкам
Ты там реверсишь ПТУР штоле? Нажил на денацифицированных землях?
Ебатья что мешает сделать механику на законах геомптрии и физики, ёпта?
Я был бы очень счастлив, будь у меня возможность зареверсить птур/пзрк или что-нить такое, но, увы, пока возможность не попадалась :/
живу прям в пизде относительно места демиллитаризации
>живу прям в пизде относительно места демиллитаризации
давай адрес
сейчас вышлем образец своим ходом
Вариантов дохуя. Есть сигнал с головы, сигнал на серву, некий вычислитель-преобразователь посередине. Все три компонента можно реализовать разными способами.
- Рули это просто. Обратная связь угла по потенциометру, H-мост на управление вперёд-назад. Тупая логика if a<b do A else B, которую можно хоть на операционном усилителе реализовать.
- С головой больше всего неясностей. Скажем, у Иглы единственный узкополосный фотодатчик, смотрящий по диагонали, на вращающейся оси. Для полёта на упреждение этого достаточно. В этом случае нужно снимать угол и запоминать его, пока сигнал с ИК = TRUE. Вариантов тут дохуя, от механических галетных переключателей до фазовых магнитных датчиков. Запоминать тоже можно хреновой тучей способов: https://pikabu.ru/story/istoriya_operativnoy_pamyati_5431295
Если же у тебя несколько широкополосных датчиков - всё с одной стороны проще, ибо операционным усилителем ты тупо в реальном времени меряешь, кто видит сильнее (продвинутый вариант - насколько сильнее). А с другой стороны всё сложнее, ибо нужна фильтрация сигнала, правильно отрегулированная оптика и вот это всё.
- Преобразователь-вычислитель в простейшем случае сравнивает угол рулей с углом головы и даёт сигнал на H-мост по X и Y. В продвинутом - берёт поправки на упреждение, на силу тяжести и.т.п.
Зареверсить ПТУР под аналоговую схемотехнику - слишком мудрёная задачка для подвала денацифицируемой территории. Тут вопрос больше не что делать, а как делать - нужен итеративный цикл испытаний разной степени натурности, от осциллографа до стрельб. Самих испытаний где-то так за сотню. Нужен целый НИИ со своим полигоном. И персонал соответствующий, которого нет ни в ополчении ДНР, ни тем более в батальоне Азiв.
>Я вообще не понимаю, как из этого можно извлечь угол...
Ты не понимаешь, как из напряжения можно извлечь угол? Тогда в вышеупомянутый НИИ ты не пройдёшь.
Аналоговые алгоритмы - они точно также же как цифровые, только местный int/float самоконвертится автоматически под произвольное число битов, зато с дебаффом на точность. Где-то это охуенно удобно, ибо упрощает схему из стопицот транзисторов до нескольких элементов. А ещё АВМ в силу особенностей своей природы умеет легко решать диффуры. Где-то наоборот это неудобно, ибо сильно ветвящуюся логику на аналоге делать изврат.
>Обратная связь угла по потенциометру
В таком вероятнее СКВТ, а потенциометры это в игрушках с алиэкспресса.
Спасибо за развернутый ответ, анонче
Был тут лет 10 назад антуан, который пилил систему лазерного наведения. Пропал потом резко. Навсегда.
Причем пропал после того, как запостил печатку. Круглую.
Лол, а он неплох. Другой вопрос что самопальные ПТУРы это дорого и невыгодно, так что заниматься ими можно ради прикола если только
Анон, что почитать можно по теме? Вижу, ты перец прошаренный
>Вижу, ты перец прошаренный
Это тарищ майор на живца ловит, лел.
>H-мост на управление вперёд-назад. Тупая логика if a<b do A else B
Словит автоколебания с хорошим шансом. Причём в статике может не ловить, а вот в полёте да.
ПИД регулировние не проходили еще?
За сколько пусков подберёшь коэффициенты?
Это релейное управление, там нужен только d коэффициент. И дилды такое на стендах подбирали

>подберёшь коэффициенты?
Есть жы метод Циглера-Никольса!! Надо тока примотаться к ракете и ввести ее в колебательный режим, а потом уменьшая коэффициенты усе настроить!!
Поздравляем, вы выиграли пожизненную путевку на курорт под названием шарашка. Бесплатная еда и развлечения в виде телевизора с единственной программой в комплекте. Не пытайтесь сбежать из страны
Что сказать то хотел, мудень?
тщ майор все видит и на карандаш берет всех, у кого мозги есть
Шапочку из фольги надень.
мимо товарищ майор
Ну блин, я то думал ты выкупил толстоту и толстотой и ответил
что-то на зумерском, не понимаю
Тебя всмысле инетесует как просто блять поворотный механизм устроен? Или ты пришёл сюда похвастаться? На помойке нашёл? А зивер сколько смотрел? А ренген?

Как угол извлечь? Ты внатуре не бачишь? Ну на пару градусов оно повернулось, транспортиром замерил, если смог, конечно ну и смотришь на сколько делений потенциометр повернул, что сложного?
Ты не гони на релей такое не построить, надо брать ПРОСТО диод гана и ПРОСТО ПРОСТО не строить из себя ТРАЛЛЯ 90 лвла, а использовать его по назначению.
Переменный транзистор себе возьми
>возьми
А где его брать если в ЧиД только ПОДСТРОЕЧНЫЕ ТРАНЗИСТОРЫ есть?

Купи книгу, на алиб.ру 500р стоит. Шедевр.
Лазарев Л.
Инфракрасные и световые приборы самонаведения и наведения летательных аппаратов.
А так, я похожий прибор хочу сделать.
Мне надо чтобы два девайса стабильно смотрели друг на друга при морской качке.
Лазарев Л.
Инфракрасные и световые приборы самонаведения и наведения летательных аппаратов.
А так, я похожий прибор хочу сделать.
Мне надо чтобы два девайса стабильно смотрели друг на друга при морской качке.
>Если мы работаем только с аналоговой электроникой, каким образом приходит сигнал на отклонение рулей?
Фотоэлемент стоит под углом, а ракета вращается, плоскость руления у неё поэтому как бы одна относительно неё самой
Полные описания ПЗРК Стрела или Игла несколько лет назад утекли, можно нагуглить
>Мне надо чтобы два девайса стабильно смотрели друг на друга при морской качке
А зачем тебе это?
>ракета вращается
Для многих это почему-то не очевидно. Даже ПТУР с проводом вращается.
Я не он, но вангую банальную лазерную связь или радиомост с очень остронаправленными антеннами
А, может
такие системы делаются с помощью резервной обратной связи по другому каналу (по радио)
Есть даже open hardware неплохой на этут ему
Спасибо за подгон, отличная книга! Буквально учебник как сделать свой "Стингер". По нынешним временам странно что она не секретная или не запрещена.
Издание 1968 года есть на студопедии (но потом она переиздавалась ещё раза 2-3)
Это только по началу, далее она стабилизируется благодаря хвостовому оперению
>далее она стабилизируется благодаря хвостовому оперению
Да нет же, и оперение кривое обычно, раскладываются стабилизаторы полукруглые
Хахах
Хорош
Купил ту книгу что была в треде, пару фоторезисторов PbS. Пока затуп с зеркалами и усилителем.
Параболическую поверхность распечатай на 3Д принтере и покрой серебрянкой
А с усилителем какие проблемы в 2023?! Подходит абсолютно любой
Самое сложное это зеркало. Серебрянка это баллончик или порошок алюминиевый ? Зеркало на принтере не очень будет похоже на зеркало по причине неровностей.
Усилитель-модуль ad620. Фоторезистор стоит в мосте уитстона.
Чувствительность фоторезистора в этой схеме без зеркальной системы - 1-2 метра видит включеную горелку
Чувствительность фоторезистора в этой схеме без зеркальной системы - 1-2 метра видит включеную горелку
Мне кажется, краска из балончика будет плохо отражать ик.
>Самое сложное это зеркало.
Возьми готовое, хуле
>Серебрянка это баллончик или порошок алюминиевый ?
Да
>Зеркало на принтере не очень будет похоже на зеркало по причине неровностей.
Полирни немного
Тебе не оптическое качество поверхности нужно ведь, а просто чтобы более-менее всё фокусировалось в точке
>Чувствительность фоторезистора в этой схеме без зеркальной системы - 1-2 метра видит включеную горелку
Надо подумать чем заменить азот. Пельте + батарейка, видимо
Ебейшая система охлаждения самой пельтьешки
Водоблок для охлаждения уже едет
>Ебейшая система охлаждения самой пельтьешки
Зачем? Важно от миниатюрного датчика отвести тепло на 1 минуту (прицеливание + полёт вряд ли продлятся дольше)
Просто на корпус или небольшую медную чушку отводи
Я даже минуса на поверхности пока не могу добиться, горячая сторона пельтье перегревается мгновенно

Ты хотя бы фотки запости, террорист мамкин.
>горячая сторона пельтье перегревается мгновенно
Туда медный кубик, за минуту Пельтье его не прогреет
Зачем тебе фоточки, анон ?
У меня там всё всрато
Медного кубика нет. Из медного только провод

Нахуй тебе пельтье, поливай сжиженным газом для охлаждения.

Пропаном ?
>Пропаном ?
А далее его нагретый используй в двигателе вместо пороха
>Зачем тебе фоточки
>У меня там всё всрато
Посмотреть что происходит.


Я пока хочу не голову делать а олс. Или правильнее тепловизор с механической разверткой
А что за сенсоры?
Фоторезисторы PbS
большие фсаг2, маленькие фсаг1
Я так понимаю тебе нужно их много, ведь как одним можно померять направление?

Чета сложна. А есть реальные фото вместо схемы? Мне на конкретном примере легче понимать.
В КБ или НИИ иди, может там увидишь в живую

Тогда не забудь ещё светофильтры, можно даже сменные каруселью, ты ведь всё равно на съёмке не спешишь?
они на алике за копейки на все мыслимые длины волн
>Я так понимаю тебе нужно их много, ведь как одним можно померять направление?
Выше в треде уже обсуждалось
>Зеркало+модулирующие диски?
Лететь надо не на цель, а с упреждением
Тогда своими словами поясни. Диск крутится и получается, что когда свет попадает на боковой лепесток, то сенсор темнее, чем когда свет попадает в щель. А если цель по центру, то там все время щель и свет постоянный. Так? Если так, то как сенсор отличает симметричные ситуации, они должны давать одинаковую синусоиду.
2 модулирующих диска
Не совсем понял, зачем. Мне надо просто сделать картинку, измерение температуры не требуется.
>Мне надо просто сделать картинку
В разных длинах ИК-волн предметы выглядят по-разному
Ну что там оп, пили пикчи и результаты.
А может ты ?
тебе не нужна картинка тупица тебе нужно ПЯТНО которое необходимо обработать аналоговыми вычислителями на основе нет не цап и ацп кретин а обычных диференциальных усилителей и всяких там специализированых этих ну как их????
подавить шумы ложные цели и прочие помехи от РЭБ как собственой которую ты знаеш и РЭБ противника
карочи это целая система и чтобы ты понял как она сложна начинай гуглить в высоко стабильные пилогенераторы
я тебе даже подкину 1 штуку где ты палюбому обасрешся
и называеца она термостабильность элементов
например расмотрим простейший пилогенератор
вспомнил вумное слово кампаратор
это как правило очень стабильный относительно малой емкости а в условиях серии высоко точный по параметрам конденцатор -керамика сасет хуи тантал еще не юзал но надо погуглить не суть важно - пленочные от старых совковых и не только видаков ахуенны
суть вот в чем ты начинаеш мантировать эту схему я всегда ее мантирую и отлаживаю в первую очередь тк от качественой работы имено этого узла зависит вся дальнейшая пляска с бубнами и там он далеко не один
пропустим выбор полуппроводников и стабилитрона - один хуй ты придеш к необходимости термокомпенсации ДРУГИМИ методами
остановимся на самих методах а их нетакуж и много
1 есть термостабильные стабилитроны - напомню нам необходима ЛИНЕЙНАЯ пила а там и так уже 2 транзистора и один стабилитрон - карочи как только я осазнал сию жопу то пришел к выводу что надо вот именно ЗНАТЬ какая температура этого блока
есть динамическая а есть статическая стабилизация
статическая менее точная но более дешовая и легковыполнимая - -заливаем все спегмой десвтеного ослика и суем в испытательную камеру - высчитываем коэфициенты отклонения забиваем табличку из резюков ну или в контроллере - ога ога матрицу - вопрос никагда не задовался вопросом нахрена на моей 51 архитектуре 64к оперативы и 64к пзу? а вот в современные контроллеры введены цапы и ацп? кстати можеш тролить потреблядков - сними такой видос а именно - собери простую схему контроллер с ацп меряет чтото и начни его греть от минус маразилки обычного холодильника до ну хотябы +80по цельсию вот именно для калибрующих табличек - дернули из пзу эталоны в оперативу и там уже все происходит это цифра эталоны без них никуда
есть и другой метод аналоговых вычислений онже динамический
есть канкретные нули точки где ты однозначно цепляешся табличка меньше но вычисление происходит динамически на основе заранее... карочи дедовых законов тое несколько датчиков маниторят температуру и поправки на вычисления именно считаюца - сейчас человеки пошли по этому пути спорный путь тк датчиг это + в поправку и + отказ - достоверность сигнала
совокупность применения тех или ины методов зависит от задачи
например ракета сколько там она летит? ну от силы минуту потом устройство саморазрушаеца + необходим фактор дешевизны посему тут хвватит и табличек а вот в тоймже оваксе или напрример волге и прочих стационарах которые видят на не одну тышу км футбольный мячик там комплексная система и что там высрал советский разум я могу лиш только догадываца но судя по тому что у пу за мультики я предпологаю что мне и жизни не хватит даже под допингами и прочими воздействиями кровавой гебни
Эбать шиз высрался!

Если кто не понял, я вообще не оп, урвв мне не нужно, я хочу сделать ОЛС.
ы
ч
ы



Просветление содрал пастой гои 2. Как думаете, что лучше: чтобы линза фокусировала ик в максимально малую точку на площади фоторезистора или равномерно по площади фоторезистора ?
>Чувствительные элементы приемников излучения, используемых в тепловых головках самонаведения, обычно весьма малы, что необходимо для повышения чувствительности. Отношение площади входного отверстия -оптической системы к площади чувствительного элемента приемника определяет оптическое усиление системы. Чем больше оптическое усиление, тем меньше облученность входного отверстия оптической системы, при которой еще возможно наведение, и, следовательно, тем больше дальность поражения цели.

Мне казалось, оно работает как фильтр на 10.6 мкм. Фоторезисторы у меня на спектральный максимум 2.6мкм


Очень чувствительная к температуре штука. При -6 сопротивление 1,3 МОм, если зажечь спичку на расстоянии метр сопротивление падает примерно на 5кОм
>Очень чувствительная к температуре штука. При -6 сопротивление 1,3 МОм, если зажечь спичку на расстоянии метр сопротивление падает примерно на 5кОм
Механически развёртку бы сделать и картинку собрать
Сервы какие-то что ли
Именно это я и хотел.
Пока думаю о стабильном охлаждении с помощью пельтьеохлаждаемое водой. Получал -16 градусов, но потом вода нагрелась и температура ушла
Есть мысли, как измерять сопротивление фоторезистора 1,3МОм с точностью хотя бы 10 Ом ?
>
>Пока думаю о стабильном охлаждении с помощью пельтьеохлаждаемое водой. Получал -16 градусов, но потом вода нагрелась и температура ушла
Пока на улице холодно просто на балкон вынеси
>Есть мысли, как измерять сопротивление фоторезистора 1,3МОм с точностью хотя бы 10 Ом ?
Мост Вина - Робинсона?
Измерительный мост Уитстона
Блять, дожил до седых мудей и только щас узнал что это разные люди и мосты
Он для конденсатора кажется
>Есть мысли, как измерять сопротивление фоторезистора 1,3МОм с точностью хотя бы 10 Ом ?
Обычный способ чем не подходит? Ебани напруги побольше и всё
Кстати, в выше упомянутой книге нету схем? Там ведь самый фоторезистор
Там схема с вакуумными лампами. Я не знаю как адаптировать под лампы. В пзрк электрохимия на 40 или 80 вольт стоит. Сейчас проектирую зеркало.
> потом вода нагрелась и температура ушла
Ну так хто-то писал что твой выбор это кипящий газ, он при нормальных условиях нихуя не нагреется, пока не выкипит.
Либо делай каскадное соединение пельтье-на-пельтье, и охлаждай это гавно внешним контуром с чиллером, используя этиловый спирт в качестве теплоносителя. Мобильным такое решение всё равно не сделаешь, гг.
Low Level Measurements Handbook - Keithley
Дальше выбирай что брать в качестве опоры, источник напряжения, или источник тока, и загоняй результат в какие-нибудь чопперные (auto-zero) ОУ либо бери ОУ с внешними отводами для компенсации дрейфа, и делай внешнюю схему обнуления.
Мобильное и не нужно. Газ не хочется по кд покупать, буду пробовать пельтье
Компенсационный метод?
Мост уитстона, да?
Попробую мост. Ещë можно попробовать использовать сухой лед для охлаждения, 300 рублей на авито стоит

>Мобильное и не нужно
Давай уже универсальное решение делать. Тебе не нужно, нам нужно
>сухой лед для охлаждения, 300 рублей на авито стоит
Как долго он хранится? Сутки?
Наверно. Надо подготовится к экспериментам заранее, чтобы отработать 300 рублей
Кому нам ?

Сделал основу для телескопа, сейчас надо нанести медь на пластик и отполировать еë
> можно попробовать использовать сухой лед
Для промежуточных тестов сделай крепкий солевой раствор, чтобы до -20 не замерзал, и охлаждай его в морозилке.
Пустить его в контур охлаждения пельтье ?
>Пустить его в контур охлаждения пельтье ?
Если контур то теплоёмкость не так важна, а соль вредна - тогда используй водку
Есть проблемы с токопроводящим клеем для гальваники. Пробовал смешивать бф2 с графитом, он комкуется сильно. Цапонлак с графитом так не будет себя вести ?
>Есть проблемы с токопроводящим клеем для гальваники. Пробовал смешивать бф2 с графитом, он комкуется сильно. Цапонлак с графитом так не будет себя вести ?
А зачем ты хочешь зеркальную поверхность? Компенсируй шершавость увеличением диаметра, то же самое количество лучей будет прилетать в твой резистор
Сделать большое сферическое зеркало на 3д принтере сложно.
Можно и не совсем зеркальную. Главное, чтобы материал был, хорошо отражающий ИК. Алюминий, медь, серебро например.
>Сделать большое сферическое
Параболическое
>зеркало на 3д принтере сложно.
Легко, не выдумывай
Ну давай, рассказывай. Разделить большое на части, печатать отдельно и потом склеить ?
>Ну давай, рассказывай. Разделить большое на части, печатать отдельно и потом склеить ?
Да, только точки склеивания разнеси в пространстве чтобы не коробилось
> разнеси в пространстве
Это как ?



Направил на солнце и модулировал этим моторчиком с полудиском. Дальше похоже следует резонансный контур и унч
Ну покажи же
Что тебе показать ?
После контура напряжение никак не усиливается, как бы я не подключал его. Пробовал и параллельный и последовательный контур.
Сложно, нарисуй блок-схему

R1 фоторезистор.
Из этой схемы ничего непонятно
Где оно тут усиливаться должно?

В резонансном контуре. Фоторезистор модулируется на частоту 130 Гц. На пикриле напряжение на концах фоторезистора без резонансного контура в цепи
попробую как раньше инструментальник на выход моста.


Урввшными -70 и не похнет конечно.
Сопротивление 673k при комнатной температуре. Спичка в метре меняет сопротивление примерно на 1k.
сопротивление очень зависит от температуры,сейчас уже 700k
Сопротивление 673k при комнатной температуре. Спичка в метре меняет сопротивление примерно на 1k.
сопротивление очень зависит от температуры,сейчас уже 700k
Теперь при -10 вообще датчик замкнул кажись. На горелку реагирует только в упор, через зеркало из скотча никак вообще
Возможно спектральный максимум сдвинулся конечно. Надо пробовать медное зеркало.
Отключил охлаждение, горелку теперь видит но слабо(1кОм)
Возможно лед образовался на самом фоторезисторе. Силикагель надо поместить внутрь и загерметизировать
Удвою! Точка росы на климатике это тот ещё геморрой. Либо нужно её отслеживать, либо защититься от последствий.
Всегда интересовало - что это за писк перед открытием трубы и вылетом?
>Всегда интересовало - что это за писк перед открытием трубы и вылетом?
Генератор гудит
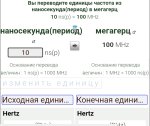
Мой проект с ОЛС успешно заморожен. Что думаете о измерении сопротивления посредством разрядки конденсатора на фоторезистор и измерении времени разрядки ?
Ну пиздец, 1300000 ом * 0,0000001 Ф = 0,13 секунд, изменение сопротивления на 1 ом меняет время на 100 наносекунд. Стм32 может измерять время настолько точно ?
У меня stm32 работает на частоте 168МГц
>Стм32
Будто других микроконтроллеров нет.
>измерять время настолько точно ?
Если в микроконтроллере есть нормальные таймеры с каналами захвата/сравнения, то с точностью до одного такта от частоты с которой тактируется таймер. Соответственно на всех стм32 период тактового сигнала может быть меньше 50нс.
Однако, ты же не прямо сигнал с лог. уровнем на логический вход подашь, вот тут то у тебя и возникнет ограничение.
Норм, но надо калибровать и учитывать, что разряд идет по экспоненте. И конденсатор взять NP0 на сколько-то нанофарад, чтобы не плыл от температуры.
Проще поставить какой-нибудь АЦП типа CS1237 или MS5193.
Если нужно измерять время с точностью до 20-30 пикосекунд, есть преобразователи время-код (TDC), например, MS1030.
Да, использование ацп выглядит проще.

Какие подводные ? Подойдет для измерения изменения напряжения в микровольтах ?
Тред не читал. А в чем проблема измерять с помощью АЦП дифференциально падение напряжения на фоторезисторе?
Тебе понадобится обмазаться сверху донизу экранированием и фильтрующими конденсаторами чтоб у тебя были все 24 бита, а не половина
Экранировать могу, конденсаторы имеются
Заказал другое ацп ADS1220

ОП, раз уж ты оттудава , скажи это правда, что украинские эльфы буржуйские противорадиолокационные HARM-ы к МИГ-ам присобачили через переходник на базе малины?
А почему бы и нет?
Там уж и ардуина подойдёт наверно.

Нет
Это какой-то ТВ-модулятор

>Это какой-то ТВ-модулятор
Дурашка, это Pi 1
>Дурашка
Зачем мне разбираться в китайском говне, скажи?
Когда у нас малина стала китайской?
АЦП пришло. Теперь понять, как его подключать к stm32

Меднение пластика провалилось. Полностью.
Отвал
я в культурном шоке, ибо думал, что тред потонул, а сейчас зашел на двачик и вы, товарищи, тут столько всего написать успели, а кто то даже теплопеленгатор собирать начал. Анону удачи в экспериментах, не пропадай
>Что думаете о измерении сопротивления посредством разрядки конденсатора на фоторезистор и измерении времени разрядки ?
Ты наркоман/хохол штоле сука? Закон ома кури, это единственным резистором делается.
Я ебу алибабу, для снятия сигнала фоторезистора городить какие-то счётчики времени и микровольтовые АЦП.
Сопротивление фоторезистора очень слабо изменяется. Для оцифровки этого изменения надо ацп.
Мост Уитстона, инструментальный усилитель, говноАЦП по вкусу. В чём проблема?
>В чём проблема?
>инструментальный усилитель
В этом скорее всего.
AD620 есть. Но даже он не дает нужную мне чувствительность
Есть вариант с увеличением напряжения на мосте. Вольт так до 50
Два каскада на обычном ad822 тогда. Микровольты на ардуину ловил через такое.
пили ацп сам ручками на пилогенераторе и кампараторе
я так температуру с точностью до сотой градуса меряю терморезюком если пилу растянуть в секунду то можно и ....
Ацп уже есть, 24 битное ads1220. Надо просто правильно инициализировать его.
>Ацп уже есть, 24 битное
А у меня есть десяток микроконвертеров AD7061. Пара АЦП и мощное ARM7-ядро

Мощно.
от самопального можно добица более высокой точности и скорости
основная жопа высрать линейную и термостабильную пилу

>от самопального можно добица более высокой точности и скорости
Если у тебя есть соответствующее метрологическое оборудование
>основная жопа высрать линейную и термостабильную пилу
Да это вообще не вопрос. Раз у нас ни AD, ни TI не высрали, то ты то наверняка высрешь

>Если у тебя есть
>ты то наверняка высрешь
ну а как ты думавенш БЫДЛО
естественно и однозначно
или ты досихпор хохлов обосаных мною баниш?
ладна еще весна разрешаю

ничтожество
>Раз у нас ни AD, ни TI не высрали, то ты то наверняка высрешь
Ты ща воспламенил булки у охранителей треда про российскую электронику.
Алсо, если на то пошло, то градус шизы мы поднимем. Термостабильную пилу (ну без активной термостабилизации) ты не высрешь, как и суперлинейную. Зато ты можешь вполне, с помощью качественного оборудования снять точную форму пилы и температурную характеристику, то имея термометр, можно будет делать уже после преобразования поправку на оба фактора. Пара полиномов и проблем нет.
анон, ну как успехи?
Смог получить данные из ацп. Сейчас пытаюсь понять как работать с дисплеем на st7789V.
И да, я делаю всë в cmsis. По ощущениям это как есть кактус.

круто. ну, про тред не забывай, местным паяльным подпивасам, в том числе и мне, интересно, как у тебя прогресс. модулируешь, опять же, через растр? менял его конструкцию? и еще. по поводу оптики, я не знаю, сам проверю как нибудь, вычитал на форуме, что можно параболическое зеркало сделать, замесив эпоксидку в кастрюле, которую нужно раскручивать на какой то скорости вург своей оси. эпоксидка типо затвердеет, можно снять ее, она как раз будет в форме параболы. нанести сверху серебрянку и се.
пы.сы. мне кажется, надо подобный тред сделать постоянным, типо оптической, тепловизионной и прочей ебанины тред. соберем свой маверик всем двачем, а потом на видиконы или пзс матрицы замахнемся
Были потуги в растробосрался с подливой, что-то похожее на параболу напечатал на принтере. Пробовал в гальваническое меднение, медь плохо села. Завтра или послезавтра попробую серебрянкой покрыть.
Пока я живя буду срать сюда, тред не должен улететь в архив.
Я ещë любил раньше читать тред /spc program. Жаль что тред умер.
>от самопального можно добица более высокой точности и скорости
>основная жопа высрать линейную и термостабильную пилу
Хуй ты её без плясок с бубном высрешь, в том-то и проблема.
А вот регистру последовательных приближений похуй на термостабильность, поэтому цифровые АЦП и вытеснили аналоговые отовсюду, где требуется скорость.


Мне это не нравится. Мб есть какой-то секрет в нанесении серебрянки ?
а мб попробовать использовать диск от харддрайва? я думаю, может подойти, ибо поверхность зеркальная

Сделать из него параболу ?
У меня есть один блин бесхозный но боюсь, я не смогу выточить точную параболу
что то я про параболу вообще не подумал... поверхность подходящая, но идея бредовая. не бери в голову
хотя, диски алюминиевые, если нагреть, то можно согнуть по форме, но тогда все зеркальное напыление с диска уйдет в пизду. полная херня короче, вариант не подходящий
>хотя, диски алюминиевые
Мне куча стеклянных попадалась.
Увеличивать увеличение.
Была идея сделать многоэлементное зеркало из прямоугольных маленьких
>я не смогу выточить точную параболу
Даже советские шкальники, по заветам ЮТ или МК (не помню точно), точили на дому параболы из толстого стекла. Какие же нынешние зумерки рукожопые, охуеть можно!
ПС. Закажи на али у китайского брата
У тебя я вижу руки откуда надо. Сколько зеркал для телескопов выточил ?
>точили на дому параболы из толстого стекла.
Не точили, а тёрли. Только оно посредственное получалось, контроль теневым методом Фуко не обеспечивает достаточно хорошего качества, но это все лучше чем ничего. Ещё покрытие как делать? Реакцией серебряного зеркала? Так оно почернеет вскоре, нужно алюминием в вакуумной камерепокрывать. Но даже тем кто находил доступ к вакуумной камере, вряд ли наносили поверх алюминия защитный слой из диоксида кремния.
Так что хоть и тёрли, результат был посредственным в основном.
>ПС. Закажи на али у китайского брата
Вот это правильно. Или я могу продать занедорого от телескопа, все равно оно для телескопа кривое слишком. Только похоже что зеркало не спасет анона, он в остальном везде где можно налажает.
>Увеличивать увеличение
Парабола не даёт увеличение
Предельное увеличение ограничивается только диаметром главного зеркала и атмосферными помехами
К параболизации прибегают только ради уменьшения размеров конструкции, при отношении диаметра зеркала к его фокусному расстоянию свыше 1/10 парабола не нужна.
> Ещё покрытие как делать
В любой мастерской по изготовлению бытовых зеркал, их там алюминием напыляют в вакууме.
Прибор Фуко даёт вполне достаточную точность
>из диоксида кремния
Это лишнее
Зеркало диаметром 150мм на пике алюминировано в конце 90-х.
>Прибор Фуко даёт вполне достаточную точность
На самом деле нет, разве только при относительном отверстии 1/10 и менее, да и то под вопросом. Так можно и рефрактор Гюйгенса в пример привести, что мол ахромат не нужен, а он и в самом деле не нужен при очень малых относительных отверстиях.
Реально нужно помимо теневого метода ещё контролировать интерферометром, если нужен результат лучше чем из магазина. Но если тебе и самоделки разной степени кривизны отлично идут, то это только потому что ничего нормального не трогал.
>Это лишнее
Оно у тебя в квартире пролежало, не считается.
http://fidgor.ru/Observers/Test/test_59.html
http://fidgor.ru/Observers/Test/test_06.html
>Тезис о том, что "хороших старых самодельных любительских ГЗ не бывает" обрёл ещё одно подтверждение, пусть и косвенное.
Если число штреля 0.5, то зеркало явно не того. Однако и в такое будет видно дофига всего и может показаться что все отлично.
http://fidgor.ru/Observers/Test/test_06.html
>Тезис о том, что "хороших старых самодельных любительских ГЗ не бывает" обрёл ещё одно подтверждение, пусть и косвенное.
Если число штреля 0.5, то зеркало явно не того. Однако и в такое будет видно дофига всего и может показаться что все отлично.
> нет
Ты пользовался прибором Фуко?
Если да то покажи каким
> не считается.
Видимо всё зависит от процесса подготовки и напыления, эти зеркала напылены в один месяц и пролежали рядом в квартире одинаковое время.
Фошист
Можно сказать что нет. Несколько раз только, у вот этого http://fidgor.ru Теневой метод даёт качественный результат в любом случае, а не количественный и оцениваешь ты самоделки качественно. Знаешь ли, у меня больше доверия человеку который не только теневой прибор собрал и не один, а ещё и интерферометр, который не просто полосатики, а зеркало где-то ещё аттестовал.
И все равно в самоделках смысла не особо, ну натрешь зеркало допустим более-менее, а корректор комы? Без корректора толку то не будет от всего этого.
>который не просто полосатики
Полосатит, автоисправление на телефоне сработало.
фошист не то слово, он просто ангел в сравнении со мной
кек
> не трогал
Это мой прибор Фуко
Покажи свой "интеферометр"
И да, то кварцевые стекла, не иллюминаторные, хотя и из обычного можно сделать весьма приличное зеркало 180 мм 1\6 в которое вполне можно развидеть штук восемь спутников Сатурна, например

А толку? У человека есть аттестованный плоский эталон, если тебе это ни о чем не говорит, то ну не знаю, толку тогда тебе с фотки.
И с чего это у тебя не открывается? Впрочем, вот тебе фотография, там как раз теневой прибор.
>ни о чем не говорит
Ну да, тут только ты один профессор рукожопый
>плоский эталон
Для ретуши отдельного зеркала в процессе изготовления и нахуй не нужен, лишние искажения поскольку идеальную поверхность с бесконечной кривизной создать невозможно в принципе, но вполне годится для испытания готового китайского телескопа
Да
Такие себе понты для заезжих астрономов-аматоров.
Кек
Есть ещё желающие попараболизировать на китайском 3Д принтире?
Нет
Ну не разбираешься - молчи, чего бы свое невежество выставляешь на показ)

Бримстоуны и хеллфаеры на полуактивном лазерном наведении имеют похожие гсн

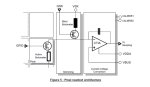
Я правильно понимаю, на схеме микросхемы это операционные усилители ?
Да

Спасибо за ответ


Пробежался по треду глазами увидел фразу "тепловизор с механической разверткой". Захотел поделиться своими экспериментами. Я вытащил черный диод из этого модуля, подключил к arduino, написал программу которая измеряет напряжение на этом диоде и отправляет в serial порт. Написал простую программу на processing, которая принимает данные с serial порта и превращает их в цвет. В ручную(с помощью стрелочек влево и вправо) можно задать какой из "пикселей" будет принимать данные. Положил ардуину с диодом на стол на котором рулетка растянута, включил горелку по середине пути, и двигал с определённым шагом диод, и синхронно с этим менял номер квадратика который будет принимать данные. В итоге получилась вот такая полоска где красный цвет это горит горелка, а синее окружающая комната.
Когда нибудь будет у меня отпуск и попробую сделать тепловизор с механической развёрткой. А патом можно будет попробовать сразу синхронно вместе со развёрткой rgb тепловизора механически с помощью светодиода развёртывать изображение на экране
Когда нибудь будет у меня отпуск и попробую сделать тепловизор с механической развёрткой. А патом можно будет попробовать сразу синхронно вместе со развёрткой rgb тепловизора механически с помощью светодиода развёртывать изображение на экране

Твой диод можно назвать тепловизором только для ОЧЕНЬ горячих объектов. Он видит максимум 1000нм. Человек излучает максимум ИК в 310К а это 9000 нм
Ну я знаю, что хорошего тепловизора из этого диода не получится, но на поднесённую руку он реагировал повышением уровня сигнала
Ты скорее видел отражение солнечных лучей.
Я снова выхожу на связь. Как приделать металл к плëнке PbS ?
очевидно выращивать эту пленку уже на металле например в парах серы

Я правильно понимаю, это контактная сварка ?
Да, "разварка" называется
Можно ли эту "разварку" реализовать дома с бюджетом в 2 тысячи рублей ?
>Можно ли эту "разварку" реализовать дома с бюджетом в 2 тысячи рублей ?
Да наверно
Но обычно золотом варили раньше эти усы, хз где такую золотую проволоку взять
На ширпотребе оловом делают, а вообще, гугли "Сэм Зилоф" американец, уже сделал полностью сам микруху в корпусе или "самодельная микросхема". На хабре чел чет там пытался, но я не знаю результатов
Ну с бюджетом в 2 тысячи вечнозеленых микруху по его технологии сделать можно. Правда пробелма в том что метрологического оборудования там на десяток косарей баксов надо

Ну, это несложно - в баксов 100 можно уложиться, если шаришь.


У меня идея ещë сомнительней. Кишки паяльника не использовать. Просто горелкой греть место пайки. Или феном паяльным
Отпаяешь соседние проволочки
А если аккуратно, без перегрева ?
Путать сварку и пайку
@
радач 2023
На чипе оно прихуяривается к металлическим площадкам так что в принципе можно и то и то использовать
>к металлическим площадкам
К микроскопическим, металлизированным участкам на кремнии.
Я вспомнил, есть транзистор 2Т317, он безкорпусной, в пластиковой упаковке поставляется. Там есть золотые "волосинки" длиной около 10 мм, можно их отрезать и для тестов крепления к самодельному кристаллу их применить наверное.
Как я понял, разварку делают придавливанием с ультразвуком. Пытался осадить фотосопротивление на стекло, получалось через раз и само фотосопротивление на ик свет реагировало слабо. Наверно из-за плохой повторяемости из них не делали четырëхквадрантные датчики как в лазерных gbu
>как чисто аналоговыми методами можно сказать приводу повернуться либо в одну сторону на определенный угол, либо в лругую?
Ну например сельсин



Горько это всё серьёзно в переводе с вкусо-запахов тех кто говорит ротешником и ебал твою мамку в пиздожопу очевидно
див?
?

тред не умирай

Тредику 2 года !
Сегодня нанëс химическим способом PbS на ситалловую подложку с медным напылением. Получилась термопара.

За эти два года я так и не смог сделать хотя бы близкий к заводским характеристикам фоторезистор. Пробовал только метод осаждения из водного раствора, PVD не могу себе позволить
>За эти два года я так и не смог сделать хотя бы близкий к заводским характеристикам фоторезистор.
А нахуя? В чём проблема купить?
дорого, пиздец
Успехи ?


Раздуплился таки и заказал набор зеркал для телескопа рефлектора и ик линзу из ZnSe с фокусным расстоянием 25мм

Что по итогу трела то получается? Я тут сам подумываю о тепловом наведении в одном из своих устройств, насколько реально реализовать такое с заводскими фоторезюками?
Простейший тепловизионный модуль для микроконтроллера с относительно малым количеством пикселей mlx90640. Видит до 10 метров примерно. Расскажи, что сделать хочешь
Ну вообще в планах турель (не боевая, просто игрушка). Первое время планировал просто использовать камеру и opencv что бы наводка была по всему что движется, но увидел ваш тред и как-то даже захотелось попробовать тепловую наводку, я так понимаю это будет реализовать сложнее.
А не раскрутка-ли гироскопа газом или пороховым аккумуляторм давления? Хули там генератору пищать то?
This.
Какие успехи у треда ?

Это бутылка ?

А причëм здесь антенна базовой станции ?

>Какие успехи у треда ?
?
ОПа-хуя сдиванонили и затралели
И как ?




Сап, радач. Вопрос, возможно, странный и носит чисто теоретический характер. Возьмем любую ИК-голову от любой УРВВ, скажем, 60х годов (нам без разницы, сидит ли она на гиростабилизаторе, либо статичная, как у какого - нибудь сайдвиндера). Через оптическую систему у нас приходит луч на датчик цели в виде термопары или фоторезистора, сигнальное напряжение усиливается до приемлимого уровня. Если мы работаем только с аналоговой электроникой, каким образом приходит сигнал на отклонение рулей? Как пишут в умных книжках, угол поворота руля пропорционален напряжению, но как чисто аналоговыми методами можно сказать приводу повернуться либо в одну сторону на определенный угол, либо в лругую? Использовать отрицательные напряжения? Как вообще напряжение преобразуется в угол поворота стабилизатора?
Это же касается и самых первых МБР с аналоговыми СУ. Там с потенциометра гироскопа снималось напряжение, пропорциональное отклонению. Я вообще не понимаю, как из этого можно извлечь угол...